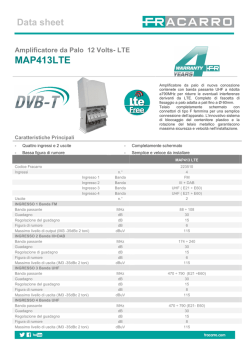
ELETTRONICA INDUSTRIALE CL in Ingegneria g g Meccatronica Prof. Ing. Giovanni Verzellesi E-mail: giovanni.verzellesi@unimore.it Ufficio: c/o DISMI – Pad. Morselli Tel.: 0522-522605 1 Informazioni utili • • Ricevimento: mercoledì, ore 16-18, presso DISMI, Pad. Morselli. Testi consigliati: 1. 2. • • A.R. Hambley “Electronics – 2nd Ed.” Prentice Hall, 2000, ISBN 0-13-691982-0 (Cap. 10, 11, 12 – testo usato anche per il corso Elettronica). N. Mohan, T. Undeland. W. Robbins, “Elettronica di potenza”, Hoepli, 2005, ISBN 88-203-3428-3, €34,00 (Cap. 1, 2, 5, 6 – testo usato anche per il corso Convertitori Elettronici di Potenza). Altro materiale: 1. 2. Appunti delle lezioni. Lucidi di ausilio alle lezioni: disponibili sul sito www.elettronica.ingre.unimore.it – – – Iscrizione all’esame attraverso esse3. Prova scritta: esercizi + teoria. Registrazione attraverso esse3 esse3. Modalità di esame: 2 1 Programma del corso • • • • Introduzione Filtri analogici. g Convertitori A/D e D/A. Interruttori di potenza a semiconduttore. • Raddrizzatori a diodi non controllati. • Raddrizzatori controllati. • Regolatori di tensione tensione. Alimentatori. • Collegamenti fra dispositivi e apparecchiature. • Case studies. 3 Parte 1 Introduzione 4 2 Sistemi elettronici Controllo Sensori Condizionamento, ADC Condizionamento, DAC Attuatori Elaborazione μC, PLC HW - SW 5 Esempio: sistemi elettronici per automotive • Un sistema elettronico per automotive può essere composto di: – Servo attuatori con sensori di posizione, pressione, accelerazione… – Circuito idraulico / elettronico / meccanico – Human Interface Unit (con force feedback…) – Sistemi di controllo elettronico fault tolerant – Bus di comunicazione fault tolerant • Vincoli realizzativi molto forti imposti dalle specifiche automotive. 6 3 Sistemi elettronici per automotive • Nelle applicazioni automotive: – 90% dell dell’innovazione innovazione è nell’Elettronica nell Elettronica (in maggior parte software, ma anche hardware). – Fino al 2010 le funzioni elettroniche nell’auto cresceranno di più del 10% all’anno. – Oggi: 20-25% del costo di produzione per l’elettronica; nel 2010 sarà il 35-40%. 7 8 4 9 L’elettronica applicata all’automotive non riguarda più soltanto il motore e gli organi di trasmissione, ma comprende anche i navigatori satellitari, gli airbag, i climatizzatori; si prevede che in futuro i sistemi elettronici andranno a costituire tit i il 90% delle d ll innovazioni i i i nell settore, portando la quota di valore dell’elettronica sul totale dell’automobile al 40% nel 2010. Per far fronte al bisogno crescente di potenza nei veicoli di domani si sta pensando di affiancare alle rete 14V una seconda da 42V. 10 5 Perché i computer per l’automobile • • • • • • Complessi p sistemi di controllo del motore per il controllo delle emissioni, dei consumi, … Diagnostica avanzata Semplificazione della progettazione e della fabbricazione delle auto Riduzione dei cablaggi Nuove richieste per la sicurezza Nuove richieste per il comfort 11 Controllo del motore – 1 • Le nuove leggi sulle emissioni impongono un controllo sofisticato delle miscele aria/carburante, al fine di rendere possibile l’abbattimento di agenti nocivi nella marmitta catalitica. Non è più possibile progettare un motore senza un microcontrollore. microcontrollore The computer from a Ford Ranger 12 6 Controllo del motore – 2 • Il controllo del motore è il compito più gravoso per il processore nell’auto. L’ECU (Engine Control Unit) contiene di solito il processore più potente. L’ECU implementa i controlli ad anello chiuso per la gestione delle emissioni e dei consumi del motore (oltre ad altri parametri) parametri). • Raccogliendo informazioni da dozzine di sensori differenti (temperatura dei liquidi di raffreddamento, percentuale di ossigeno nei gas di scarico, …) e applicando complicati modelli matematici, l’ECU riesce a fare una serie di operazioni e di confronti con look-up table per poi gestire l’iniezione l iniezione, l’accensione delle candele, ecc. 13 Controllo del motore – 3 • Una ECU può contenere un processore a 32-bit, 40 MHz. Il codice che gira è ottimizzato per occupare poca memoria. Il processore è assemblato in un circuito stampato multistrato insieme a centinaia di altri componenti componenti. The pins on this connecter interface with sensors and control devices all over the car. 14 7 Dentro la “scatola” – 1 • Convertitori Analogico Digitali • Uscite digitali di potenza: l’ECU ha il compito ((ADC)): leggono gg le uscite di p di accendere le candele,, alcuni sensori nell’auto, come aprire e chiudere gli iniettori, ad esempio i sensori di accendere e spegnere le ventole di ossigeno. L’uscita di un raffreddamento. Questi compiti sensore di ossigeno è sono gestiti con segnali digitali tipicamente un segnale (ON/OFF, H/L). Per esempio, analogico tra 0 e 1.1 V. Il l’uscita deve fornire 12V e 0.5A convertitore lo “traduce” in un quando la ventola è accesa, 0V valore l digitale di it l a 10-bit. 10 bit quando d è spenta. t Il segnale l digitale di uscita è come un relé. Il micro non è in grado di fornire la potenza necessaria. Comanda solo i circuiti di potenza in uscita. 15 Dentro la “scatola” – 2 • Convertitori Digitali Analogico ((DAC)): a volte le uscite necessarie a comandare qualche parte del motore sono analogiche; il micro fornisce in uscita un segnale digitale che deve essere convertito in analogico. • Circuiti di condizionamento: servono ad adattare i livelli dei segnali tra le diverse parti dell’ECU. • Chip di comunicazione: implementano i vari standard di comunicazione tra l’ECU e altre centraline. Ci sono diversi standard, e uno dei più usati è ora il CAN (Controller Area Network), fino a 500kbits per sec (Kbps). Il bus CAN è bifilare (cioè basato su segnali differenziali). 16 8 Sensori intelligenti – 1 •I sensori intelligenti cominciano a comparire sul mercato. È una nuova t tecnologia l i che h permette tt di fornire f i sensori di dimensioni molto ridotte collegati con una parte elettronica che produce già una prima elaborazione del segnale. •Ad esempio, un sensore di pressione tradizionale produce una tensione di uscita variabile che dipende dalla pressione applicata, applicata che non è lineare, che dipende dalla temperatura e che è di basso livello. •Alcuni costruttori cominciano a fornire smart sensor che sono i t integrati ti con tutta t tt l’l’elettronica l tt i e con un microcontrollore che legge la tensione, la calibra usando delle curve di compensazione della temperatura e fornisce un’uscita digitale sul bus di comunicazione. •In questo modo il costruttore di auto non è tenuto a sapere tutti i dettagli di come funziona il sensore sensore, etc etc etc… e comunque sa di poter ottenere un risultato corretto. 17 Sensori intelligenti – 2 • Un altro vantaggio degli smart sensor è che la loro uscita digitale che viaggia sul bus è meno sensibile ai disturbi elettrici. I segnali analogici sono più sensibili ai disturbi… • I bus di comunicazione e il microprocessore aiutano anche a semplificare e ridurre i cablaggi attraverso opportune cablaggi, tecniche di multiplexing. • Non si presenta più la situazione in cui ad ogni dispositivo corrisponde i d un cavo di controllo ll e/o attuazione. Es. nel “blocco portiera” i segnali sono multiplexati alla centralina che attiva poi i vari dispositivi di uscita. 18 9 Sistemi embedded – 1 • • • • • • • • • • • • • • • • • • • • • • • • Anti-lock brakes Auto-focus cameras Automatic teller machines Automatic toll systems Automatic transmission Avionic systems Battery chargers Camcorders Cell phones Cell-phone base stations Cordless phones Cruise control Curbside check-in systems Digital cameras Disk drives Electronic card readers Electronic l instruments Electronic toys/games Factory control Fax machines Fingerprint identifiers Home security systems Life-support systems Medical testing systems • • • • • • • • • • • • • • • • • • • • • • • • Modems MPEG decoders Network cards Network switches/routers / On-board navigation Pagers Photocopiers Point-of-sale systems Portable video games Printers Satellite phones Scanners Smart ovens/dishwashers Speech recognizers Stereo systems Teleconferencing systems Televisions Temperature controllers Theft tracking systems TV set-top boxes VCR’s, DVD players Video game consoles Video phones Washers and dryers 19 Sistemi embedded – 2 MCF5272 Coldfire board with Bluetooth connectivity • Motorola Coldfire 5272 (32 bit,, 2.1 Mips, p , 66 MHz) • Internal RAM 1Kx32 • Internal ROM 2Kx32 • Cache: Program 256x32 Internal • 4MB SDRAM Memory • 2MB Flash Memory • USB • I2C Port • High speed RS232 • Ethernet Eth t 10/100 • PWM: up to 3 channels 8 bit • Reconfigurable GPIO (40) • Bluetooth transceiver Mitsumi WML-C11 (Class 1-15dbm Max) • GPS module SDRAM BLUETOOTH TRANSCEIVER USB RS232 4MB (1MBx32) FLASH ETHERNET 10/100 2 MB PWM CONTROL G.P.I.O. 20 10 Sistemi embedded – 3 Steer-by-wire • • • Il volante è solidale ad un motore elettrico che deve sia trasmettere i dati di sterzata alla centralina che trasmettere la sensazione di guida all’utente. L’attuazione della sterzata avviene attraverso un sistema elettroidraulico (ad es.) comandato dalla centralina. centralina La centralina comunica con il volante e con l’elettrovalvola su una rete fault-tolerant. 21 Alimentazione di un computer laptop 22 11 Alimentazione di un veicolo elettrico 23 Parte 2 Condizionamento dei segnali: a. [ Amplificazione lineare (già à nel corso Elettronica) ] b. Filtraggio – cap. 11 Hambley c. Conversione AD e DA – cap. 12 Hambley 24 12 Filtri 25 Segnali • Che cos’è un segnale? – Un segnale è una qualunque grandezza fisica variabile cui è associata una informazione. – Il modo più conveniente per caratterizzare, studiare ed elaborare un segnale passa attraverso la schematizzazione dello stesso come una funzione matematica di una o più variabili. (t tt d (tratto da llezioni i i di F F. P Pancaldi) ldi) 26 13 Filtraggio • Ci sono circuiti attivi e passivi che modificano il loro p al variare della frequenza. q comportamento • La dipendenza dalla frequenza della risposta del circuito è determinata dalla presenza di componenti reattivi. • Un quadripolo che, nella trasmissione dei segnali dai suoi terminali di ingresso a quelli di uscita, presenti caratteristiche selettive, ovvero discriminatorie relativamente alla frequenza, viene detto FILTRO. • Tutti T tti i circuiti i iti hanno h un loro l caratteristico tt i ti comportamento in frequenza e danno luogo ad un effetto filtrante. I filtri sono circuiti realizzati apposta per questo. 27 Applicazioni dei filtri • Attenuazioni dei disturbi, del rumore e delle distorsioni sovrapposti al segnale utile e generati dalle imperfezioni dei canali e delle tecniche di trasmissione utilizzati nelle telecomunicazioni. • Separazione di 2 o + segnali trasmessi sullo stesso canale. • Elaborazione dei segnali nel campo della riproduzione HI FI HI-FI. • Ricostruzione dei segnali ottenuti con tecniche digitali. 28 14 29 Frequenze di taglio (a –3dB) • In un circuito avente comportamento dipendente dalla frequenza si definiscono frequenze di taglio quei valori di frequenza in corrispondenza ai quali il modulo della funzione di trasferimento subisce una diminuzione di 3dB rispetto al valore assunto nella banda di lavoro (ovvero in corrispondenza della quale il modulo della funzione di trasferimento risulta √2 volte minore rispetto al valore assunto dalla banda di lavoro). 30 15 Classificazione dei filtri – 1 • Si possono classificare i filtri secondo: – campo di frequenza che lasciano passare o rigettano; – ordine; – guadagno di tensione o potenza. 31 Campo di frequenza di lavoro - 1 • Filtri passa basso (low pass - LP): – circuiti che danno luogo a una fdt in modulo pressoché costante al crescere della frequenza del segnale di ingresso dalla continua verso valori via via + elevati; l ti vii è una frequenza f di ttaglio li f2 in i corrispondenza i d della d ll quale l il modulo della fdt inizia a decrescere con pendenza più o meno ripida, tendendo ad annullarsi. La banda passante (pass band) va dalla continua fino alla frequenza di taglio, cioè B=f2. La banda attenuata o banda opaca (stop band) va da f2 a ∞. 32 16 Campo di frequenza di lavoro - 2 • Filtri passa alto (high pass - HP): – danno luogo a una fdt di modulo pressoché costante al di sopra di una frequenza di taglio f1 e pressoché nullo al di sotto. La banda b d passante va dalla d ll frequenza f di d taglio l all’infinito, cioè B=∞. La banda opaca va da 0 a f1. 33 Campo di frequenza di lavoro - 3 • Filtri passa banda (pass band - PB): – danno luogo ad una fdt di valore pressoché costante tra 2 f frequenze d di taglio l f1 e f2, mentre ill modulo d l tende d ad d annullarsi per frequenze poste all’esterno di tale intervallo. La banda passante è: B=f2-f1. 34 17 Campo di frequenza di lavoro - 4 • Filtri elimina (o escludi) banda (band rejection - BR): – danno luogo a una fdt di valore pressoché costante al di fuori dell’intervallo delle frequenze di taglio f1 e f2, mentre il modulo della fdt tende ad annullarsi entro lo stesso intervallo. Le bande passanti di questi circuiti valgono: B1= f1 banda passante inferiore B2= ∞- f2 banda passante superiore l’intervallo Bo= f2 - f1 è la banda opaca 35 Filtri reali 36 18 Ordine del filtro • L’ordine dei filtri è definito dal numero dei poli della funzione di trasferimento (fdt). 37 Filtri passivi e attivi – 1 • Il guadagno di tensione (e/o di potenza) dipende dalla presenza o dall dall’assenza assenza di elementi attivi all’interno del filtro. • E’ evidente che un circuito contenente componenti RLC, ma privo di elementi attivi, dà luogo ad un segnale di uscita caratterizzato da una potenza inferiore a quella posseduta dal segnale di ingresso; in questo caso il filtro si dice passivo. 38 19 Filtri passivi e attivi – 2 • Se invece nel circuito è presente un amplificatore, è possibile che il segnale di uscita sia in rapporto di tensione o potenza ≥1 con quello di ingresso; in questo caso si ha un filtro attivo. 39 Effetto sulla fase? • Finora si è trascurato l’effetto della frequenza sulla fase. • Si osservi però che una modifica del modulo della fdt è sempre legata anche ad una modifica della fase del segnale di uscita rispetto a quello di ingresso. • Ci sono anche circuiti che operano come filtri di fase (o passa tutto), che modificano la fase tra il segnale di out e quello di in senza intervenire in modo rilevante sul modulo modulo. 40 20 Filtri del 1° ordine – 1 H ( s) = α s + z1 s + p1 41 Filtri del 1° ordine – 2 42 21 Filtri del 1° ordine – 3 Pendenza di 20 dB/dec nella transizione tra banda passante e banda attenuata. 43 Filtri del 2° ordine H ( s) = αs 2 + β s + γ ω s 2 + n s + ωn2 Forma biquadratica Q Nel caso di poli complessi coniugati (Q>1/2): p1, 2 = − ωn 2Q ± jω n 1 − 1 4Q 2 44 22 Filtri LP del 2° ordine H (s ) = s2 + γ ωn Q s + ωn2 45 Filtri HP del 2° ordine H ( s) = s2 + αs 2 ωn Q s + ωn2 ωn 1− 1 2Q 2 46 23 Filtri BP del 2° ordine H ( s) = s2 + βs ωn Q s + ωn2 47 Circuito LC parallelo 48 24 Circuito RLC parallelo – 1 Figure 11.25 Parallel resonant circuit. 49 Circuito RLC parallelo – 2 50 25 Circuito RLC serie – 1 Figure 11.17 Series resonant circuit. 51 Circuito RLC serie – 2 Figure 11.18a Voltage transfer function for the series resonant circuit. 52 26 Circuito RLC serie – 3 Figure 11.18b Voltage transfer function for the series resonant circuit. 53 Circuito RLC serie – 4 Figure 11.19 Normalized impedance of the series resonant circuit. 54 27 Circuito RLC serie – 5 B= ωn Q Figure 11.20 Bandwidth and half-power frequencies for the series resonant circuit. 55 Circuito RLC serie – 6 • Ingresso: • Uscita: 56 28 Circuito RLC serie – filtro LP 57 Circuito RLC serie – filtro HP C R Vs L ωn 1− 1 2Q 2 58 29 Partitore di impedenze Vout ( s ) ZP = Vin ( s ) Z P + Z S 59 60 30 Filtro LP di Sallen e Key 61 Filtro HP di Sallen e Key – 1 62 31 Filtro HP di Sallen e Key – 2 63 Filtro BP di Sallen e Key – 1 64 32 Filtro BP di Sallen e Key – 2 65 Filtro BP di Delyiannis e Friend – 1 66 33 Filtro BP di Delyiannis e Friend – 2 67 Filtro BP di Delyiannis e Friend – 3 68 34 Filtro BP di Delyiannis e Friend – 4 69 Filtro BP di Delyiannis e Friend – 5 70 35 Filtri del 2° ordine basati su integratori – 1 71 Filtri del 2° ordine basati su integratori – 2 KHN biquad 72 36 Filtri del 2° ordine basati su integratori – 3 Tow-Thomas biquad 73 Filtri del 2° ordine basati su GIC – 1 Circuito GIC (General Impedance Converter) Z in = Z1 Z 3 Z5 Z2Z4 74 37 Filtri del 2° ordine basati su GIC – 2 Simulatore di induttanza Z in = RX RY sC 75 Filtri del 2° ordine basati su GIC – 3 Filt HP Filtro 76 38 Filtri del 2° ordine basati su GIC – 4 Supercondensatore Z in = 1 sC ( sRX C + 1) 77 Filtri del 2° ordine basati su GIC – 5 Filtro LP 78 39 Progetto di filtri attivi 79 Filtri di Butterworth – 1 • Per i filtri del 2° ordine a risposta massimamente piatta: Q= • Per i filtri di ordine superiore: H ( jω ) = 1 2 ⇒ H ( jω ) = H0 ⎛ω ⎞ 1 + ⎜⎜ ⎟⎟ ⎝ ω0 ⎠ 4 H0 ⎛ω ⎞ 1 + ⎜⎜ ⎟⎟ ⎝ ω0 ⎠ 2n 80 40 Filtri di Butterworth – 2 81 Filtri di Butterworth – 3 H ( jω ) = H0 ⎛ω ⎞ 1+ ⎜ 0 ⎟ ⎝ω⎠ 2n Risposta HP 82 41 Progetto di un filtro di Butterworth (n=3) H0, ω0, n ωn, Q 54,9 pF 83 Progetto di un filtro di Butterworth (n=4) 84 42 Progetto di un filtro di Butterworth (n=4) 85 Filtri di Chebychev e di Bessel Chebychev: • Ha un roll-off iniziale elevato e una attenuazione molto elevata vicino alla frequenza di taglio. • Il ripple (dato di progetto) è mantenuto inferiore a 3dB. • E’ detto anche equiripple: nella banda passante si alternano massimi e minimi locali aventi la stessa ampiezza. Bessel: • Mira ad ottenere una buona linearità della curva di fase in banda passante (cioè un tempo di ritardo tph costante a tutte le frequenze). • Usato in trasmissione come linea di ritardo. • La linearità aumenta al crescere dell’ordine del filtro. 86 43 Filtri di Chebychev –1 87 Filtri di Chebychev –2 88 44 Progetto di un filtro di Chebychev Specifiche: ripple di 1dB su una banda passante di 5 MHz e una attenuazione di 30 dB a 10 MHz. ε, ω0, n ωn, Q 89 Convertitori DA e AD 90 45 Acquisizione dei segnali • Schema di acquisizione dei segnali –Buona immunità al rumore e alle derive termiche. –Elaborazioni anche complesse vengono risolte semplicemente (intervenendo sul programma si possono modificare tipo e parametri dell’elaborazione stessa). –Il convertitore AD è preceduto da un AMUX (Analog MUltipleXer) e da un S&H (Sample and Hold). –Criticità: temporizzazione e sequenzialità con cui i segnali vengono trasferito all’ADC e i corrispondenti dati digitali vengono acquisiti dal sistema. –Devono essere previste le interfaccia e le linee di controllo. Trasduttore Amplificatore Filtro AMUX S&H Temporizzazione p e controllo ADC Elaboratore 91 Distribuzione dei segnali • Schema di distribuzione dei segnali –Dati in uscita dall’elaboratore p possono essere utilizzati in forma digitale o convertiti in forma analogica per azionare motori, accendere lampade o riscaldatori, far suonare allarmi, … –Dati in uscita dall’elaboratore possono essere utilizzati per influenzare la grandezza rilevata all’inizio della catena di acquisizione, realizzando in tal modo un sistema di controllo ad anello chiuso. –La complessità p dei blocchi di distribuzione dipende dal numero e dal tipo di dispositivi di uscita. –Analog DEMUltipleXer. Elaboratore Temporizzazione e controllo DAC ADEMUX ad altri dispositivi di uscita S&H Filtro Dispositivi di uscita 92 46 Conversione analogico-digitale –1 Figure 12.39 Analog-to-digital conversion. 93 Conversione analogico-digitale –2 Figure 12.47 Conceptual block diagram of an analog-to-digital converter. 94 47 Conversione digitale-analogico igure 12.40 The DAC output is a staircase approximation to the original signal. Filtering removes the sharp corners. (Note: In addition to smoothing, the filter delays the signal. The delay is not shown.) 95 DAC a rete di resistenze pesate v0= - Rf i0= - D Vref Figure 12.42 DACs can be implemented using a weighted-resistance network. (Note: If di = 1, the corresponding switch is to the right-hand side. For di = 0, the i th switch is to the left-hand side.) 96 48 Rete R-2R Figure 12.43 An R -- 2R ladder network. The resistance seen looking into each section is 2R. Thus, the reference current splits in half at each node. 97 DAC a rete R-2R –1 Figure 12.44 An n-bit DAC based on the R–2R ladder network. 98 49 DAC a rete R-2R –2 Figure 12.45 A practical n-bit DAC based on BJT technology that uses emitter-coupled pairs as current switches. 99 DAC a capacità commutate – 1 Figure 12.46a Switched-capacitance DACs. 100 50 DAC a capacità commutate –2 Figure 12.46b Switched-capacitance DACs. 101 DAC integrati • Integrati: – – • DAC0808. Tensione di riferimento esterna applicata al pin 14 e massa al pin 15. La corrente di uscita del DAC all pin i 4 deve d essere collegata ll t ad un op-amp e convertita in tensione. A1 è l’input più significativo, A8 il meno significativo Esempio: – – – – Parola di ingresso: 1011 0001; R1=R2=4.7kΩ; Rf=6.2kΩ; Iout=(Vref/R1)(A1/2+A2/4+…+A8/256) Vout=-Iout*Rf ; – – Iout=1.764mA Vout=10.937V 102 51 DAC integrati: data sheets –1 • • • • • Full-scale output: tensione o corrente massima che può essere erogata dal di dispositivo iti (quando ( d tutti t tti glili ingressi i i sono a 1). Resolution: la più piccola variazione in ingresso che produce una variazione in uscita ed è determinata dal numero n di bit della parola di ingresso. La risoluzione è 1/2n. Conversion time: tempo che intercorre fra il comando “start of conversion” e un valore analogico stabile in uscita. Linearity: deviazione massima della pendenza della funzione di trasferimento dalla pendenza media. Absolute accuracy: la maggiore differenza che si può avere tra un valore reale dell’uscita e il valore di uscita predetto dalla funzione di trasferimento ideale. • • • • • • Relative accuracy: la maggiore differenza tra la funzione di t f i trasferimento t id ideale l e una linea li retta tt tra t 0 e Vmax. Monotonicity:un aumento dell’ingresso digitale si traduce in un aumento dell’uscita analogica. Zero offset: differenza fra 0V e il valore in uscita quando gli ingressi sono tutti 0. Settling time: tempo prima di avere un’uscita entro una fissata banda di fluttuazione,, per p ogni g cambio dell’ingresso. Dynamic range: rapporto tra il valore di uscita massimo Vmax e la più piccola variazione in uscita. Maximum throughput rate: massimo numero di conversioni completate in 1s. 103 DAC integrati: data sheets – 2 Numero di bit Stati 2n Risoluzione (%) Peso di LSB in ppm Peso di un bit per 10V FSR 0 1 1 2 2 Dynamic range (dB) 100 106 10 0 50 500 103 5 6.02 4 25 250 103 2.5 12.04 4 16 6.25 62500 0.625 24.08 8 256 0.39 3906 39m 48.16 10 1024 0.1 977 9.8m 60.21 12 4096 0.02 244 2.4m 72.25 14 16384 0.006 61 610μ 84.29 16 65536 0.002 15 152μ 96.33 104 52 DAC integrati: data sheets – 3 DAC Risoluzione (bit) Settling time (±LSB) Errore di linearità (±LSB) Dissipazione di potenza (mW) Compatibilità con microprocessore DAC 0808 8 0.15 0.5 305 NO ZN 425 8 1 0.5 190 NO AD 7524 8 0.4 0.5 10 YES AD 561 10 0.25 0.5 300 NO DAC 312 12 0.25 0.5 375 NO AD 767 12 4 1 400 YES DAC 16 16 0.5 2 1000 NO 105 ADC flash 2n-1 comparatori Figure 12.49 Output versus input for a 3-bit ADC. 106 53 ADC a doppia rampa – 1 Figure 12.50a Dual-slope ADC. 107 ADC a doppia rampa – 2 T2=vs T1 / Vref indipendente da ReC! Figure 12.50b Dual-slope ADC. 108 54 ADC ad approssimazioni successive – 1 Figure 12.51a Successive approximation ADC. 109 ADC ad approssimazioni successive – 2 Figure 12.51b Successive approximation ADC. 110 55 ADC integrati Errore di linearità (±LSB) Tempo di conversione (1/2 LSB μs) Dissipazione termica (mW) 0804 0.5 100 12.5 0820 1 1.6 42 1 0.05 275 574 1 25 265 912 1 10 95 8-bit 10-bit 820 12-bit 111 56
© Copyright 2025 Paperzz