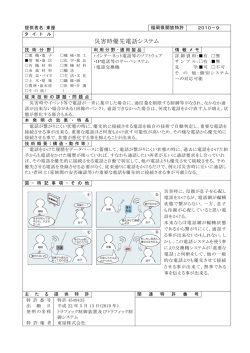
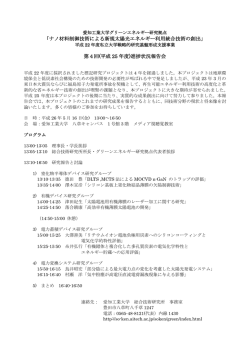
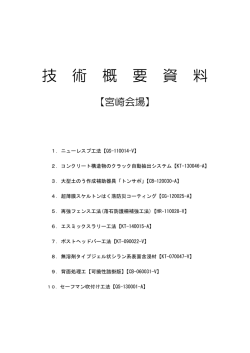
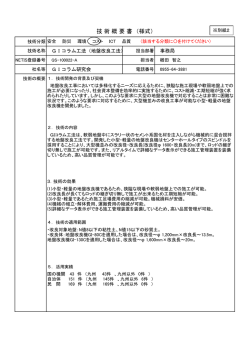
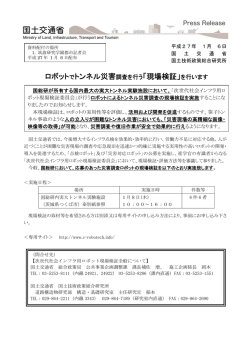
マスコミ・見学者用 次世代社会インフラ用ロボット開発・導入の推進 現場検証(災害調査技術)資料 <国総研 模擬トンネル> 集合場所: 茨城県つくば市旭1番地 国総研模擬トンネル南坑口 集合時間: 1月 8日 9:45 平成 27 年 1 月 8 日 次世代社会インフラ用ロボット現場検証委員会 災害調査部会 事務局 国土交通省 総合政策局 一般財団法人 公共事業企画調整課 先端建設技術センター 0 マスコミ・見学者用 1.本事業の概要 1 マスコミ・見学者用 災害調査部門の重点課題 [1] [2] [3] [4] 災害調査部門の応募技術数と検証技術数 対 象 分 野 応募技術数 全 32 技術 検証技術数 全 18(4)技術 かっこ内は部分検証技術数 [1] [2] [3] [4] 15 4 6 7 10 (2) 2 (2) 0 (0) 6 (0) 国総研での現場検証対象技術一覧 対象分野 検証対象技術数 [3]爆発等の危険性を把握するための引火性ガス等に係る情報の取得 ※ 3技術3者 [4]トンネル崩落状態及び規模を把握するための高精細な画像・映像 等の取得 5技術5者 技術名称 法人名 受動適応クローラロボット「Scott」による災害調査システム 愛知工業大学 小型遠隔操作災害対応移動装置の研究開発 ㈱移動ロボット研究所 自走式 3 次元トンネル計測ロボットシステム 早稲田大学 マルチダクトファンコプタ型調査ドローン 徳島大学 引火性ガス雰囲気内探査ロボット 三菱重工業㈱ 長距離遠隔操作型トンネル災害調査ロボット 清水建設㈱ 註:※[3]の対応技術については今年度評価しない 2 マスコミ・見学者用 2.対象技術概要 技術概要(愛知工業大学) 技術名称 受動適応クローラロボット「Scott」による災害調査システム 本技術は,路面形状に受動的な適応が可能な移動機構を有した遠隔操縦型クロー ラロボット「Scott(スコット)」を中心とするロボットシステムである.Scott の 高い不整地走破性と容易な操縦性により,ロボット操作に不慣れな調査者でも,遠 技術概要 隔地から災害現場の状況把握や調査を実現する技術である.ガスセンサや広角カメ ラ等を搭載することにより,安全な場所から引火性ガス濃度測定や映像の取得等が 可能である.取得情報や解析結果は,遠隔 PC にて表示・保存ができ,データベー ス化および GIS との統合が可能である. 適用分野 災害調査(□土砂崩落把握 □土砂等計測 ■引火性ガス把握 ■トンネル内把握) 図・写真等 応募者 共同開発者 愛知工業大学 エヌ・ティー・シー株式会社,中日本ハイウェイ・エンジニアリング名古屋株式会 社,サンリツオートメイション株式会社,株式会社エーアイシステムサービス 愛知工業大学工学部機械学科 奥川雅之, 連絡先 〒470-0392 愛知県豊田市八草町八千草 1247 電話:0565-48-8121,FAX:0565-48-4555 E-mail:okugawa@aitech.ac.jp 3 マスコミ・見学者用 技術概要(移動ロボット研究所) 技術名称 小型遠隔操作災害対応移動装置の研究開発 災害現場特有の瓦礫,段差を踏破し目的地に移動する小型クローラ移動装置を開発す る。移動装置は機械安全と機能安全を基本とした設計方針で製作される。移動装置に は揺動型3D距離センサと高精細カメラが搭載され、得られたデータから被災空間認知 とマッピングを行う。 技術概要 災害調査(□土砂崩落把握 □土砂等計測 □引火性ガス把握 ■トンネル内把握) 適用分野 図・写真等 小型クローラ移動ロボットの外観 原発対応に改造された Quince1 号機 応募者 株式会社 移動ロボット研究所 共同開発者 神奈川県鎌倉市台2-15-41 連絡先 電話:046743-0650 、FAX:0467-43 -065 Email:kur otaki@ir obo.co.j p 4 管路を走行する小型クローラ移動ロボット 走破実験中の Quince マスコミ・見学者用 技術概要(早稲田大学) 技術名称 自走式 3次元トンネル計測ロボットシステム トンネル災害現場(崩落・火災)において,脚車輪を駆動してトンネル内に侵入し, レーザー式 3次元形状センサによって内部の状況を 3次元データとして計測するロボ ットシステム.ロボットは段差や傾斜を踏破する能力を備え,落下物が飛散した路面 でも進入が可能である.またロボットはトンネル外に設置される指揮所から遠隔で操 技術概要 作され,計測したデータは 3次元画像として指揮所のインターフェースに表示され る. 適用分野 図・写真等 災害調査(□土砂崩落把握 □土砂等計測 自走式 3 次元トンネル計測ロボットシステム概要図 レーザー式三次元形状センサ 応募者 共同開発者 ■引火性ガス把握 ■トンネル内把握) 三次元形状データ 早稲田大学理工学術院高西淳夫研究室 株式会社アドイン研究所 東京都新宿区若松町 連絡先 電話:03-5 369-732 9、FAX:03-5 269-90 61 Email:next _infra@t akanishi .mech.wa seda.ac .jp 5 マスコミ・見学者用 技術概要(徳島大学) 技術名称 マルチダクトファンコプタ型調査ドローン マルチダクトファンコプタに受動輪を取り付け、地上滑走機能を付加した調査型ドロ ーンである。通常は車輪で移動するが、不整地や障害物がある場合は飛行することで 障害の影響を受けずに移動可能である。ダクトファンを用いることで、障害物に接触 しても安全に作業を継続できる飛行機能を持つ。レーザーレンジファインダや SL AM技 技術概要 術で作業中のマッピングが可能である。操作方法も簡略化しており半自動的に使用で きる。 災害調査(□土砂崩落把握 □土砂等計測 □引火性ガス把握 ■トンネル内把握) 適用分野 マルチダクトファンヘリ 操作を簡略化した空中台車 推力偏向で飛行する 倒立型飛行体 研空室の独自技術を集約 図・写真等 マルチダクトファンコプタ 外観図 応募者 共同開発者 マルチダクトファンコプタの障害物踏破イメージ 徳島大学大学院ソシオテクノサイエンス研究部 三輪昌史 株式会社エンルート 徳島市南常三島町2-1 連絡先 電話:088-6 56-7387 、FAX:088-656 -9082 Email:miw@ tokushim a-u.ac.j p 6 マスコミ・見学者用 技術概要(三菱重工業) 技術名称 引火性ガス雰囲気内探査ロボット 原子力発電プラント事故収束支援活動などで実績のある不整地踏破能力の高い自走式ロボ ット“櫻Ⅱ号”をベースに、防爆性能や探査機能の付加により、トンネル崩落現場におい て引火性ガスの有無を遠隔操作で探査する技術 技術概要 災害調査(□土砂崩落把握 □土砂等計測 ■引火性ガス把握 □トンネル内把握) 適用分野 図・写真等 引火性ガス雰囲気内探査ロボット(櫻Ⅱ号) 応募者 共同開発者 三菱重工業株式会社 千葉工業大学 兵庫県神戸市兵庫区和田崎町一丁目1番1号 連絡先 電話:078-6 72-3445 、FAX:078-672 -3427 Email:ken_onishi@mhi.co.jp 7 マスコミ・見学者用 技術概要(清水建設) 技術名称 長距離遠隔操作型トンネル災害調査ロボット 人の立ち入りが困難な照明のない狭隘なトンネル内の災害現場において、各種センサ ー、カメラ等を搭載した重機を、無線 LANを使用した長距離高容量伝送により遠隔操 作し、障害物を回避または、移動させながら調査個所まで重機を到達させて、多くの 坑内情報を取得できる技術。重機の遠隔操作において、搭載した 3Dスキャナにより障 技術概要 害物等の 3次元的画像を捕捉できるため、従来必要であったカメラ専用重機を不要と するため、障害物が存在する狭隘空間において機動性に富む。 災害調査(□土砂崩落把握 □土砂等計測 □引火性ガス把握 ■トンネル内把握) 適用分野 図・写真等 トンネル災害情報調査機の基本概念 三次元情報による高精度な無人化作業の実施 応募者 共同開発者 清水建設株式会社 - 東京都中央区京橋2-1 6-1 連絡先 電話:03-3 561-111 1 Email: 8 マスコミ・見学者用 3.現場検証での評価項目 現場検証を行った技術は、点検の精度、作業性、安全性、効率性(費用)などについて評価をおこなう。 具体的な評価項目は、資料に示す。 ①今年度現場検証の趣旨について 『今回の現場条件としては、笹子トンネルを参考に模擬したものであるが、災害現場は同じ条件とい うものは全く無い。また、災害を想定することも出来ないことから、各ロボットがどの程度の能力が あるかを評価し、実際に災害が起こった場合、災害状況に合わせて各ロボットを選定する。そのた め、今回の現場検証では、課題を解決したから良いとか、解決出来なかったから悪いとかの評価をす るものではありません。』 現場検証日には、『南坑口からスタート【操作場所は南坑口】し、暗所の中を3つの障害を経て70 0m先のゴールで対象物の画像、映像を取得する』とします。また、再現性も考慮して2回行っていた だきます。 次に、『南坑口からスタート【操作場所は南坑口】し、照明が点灯された状態で3つ障害を経て70 0m先のゴールで対象物の画像、映像を取得する』とします。この場合も再現性を考慮して2回行って いただきます。 但し、応募者様からの意見・要望等があればそれは順次対応させていただきます。その場合は条件付 での評価をさせていただきます。 また、現場検証で時間に余裕が生じた場合は、トンネル内を自由に使用して結構です。 デモ日には、『ゴールにある対象物の画像、映像を取得する』とします。時間が短いため、スタート 地点に関しては特に制限は設けません。照明は点灯した状態で行います。 9 マスコミ・見学者用 4.検証スケジュール 09:45 開会 09:45~09:50 災害調査部会 部会長挨拶 09:50~10:00 現場検証概要説明 高橋 弘 稲垣 孝 東北大学大学院 教授 国土交通省 総合政策局 公共事業企画調整課 企画専門官 10:00~15:55 現場検証 6 者(下表参照)。(12:30~13:30 は昼食) 16:00~17:00 意見交換会(部会委員および事務局) 17:00 閉会 対象分野 検証対象技術数 [3]爆発等の危険性を把握するための引火性ガス等に係る情報の取得 ※ 3技術3者 [4]トンネル崩落状態及び規模を把握するための高精細な画像・映像 等の取得 5技術5者 技術名称 法人名 検証スケジュール 受動適応クローラロボット「Scott」による 災害調査システム 愛知工業大学 10:00~10:45 小型遠隔操作災害対応移動装置の研究開発 ㈱移動ロボット研究所 10:50~11:35 自走式 3 次元トンネル計測ロボットシステム 早稲田大学 11:40~12:25 マルチダクトファンコプタ型調査ドローン 徳島大学 13:30~14:15 引火性ガス雰囲気内探査ロボット 三菱重工業㈱ 14:20~15:05 長距離遠隔操作型トンネル災害調査ロボット 清水建設㈱ 15:10~15:55 10 マスコミ・見学者用 次世代社会インフラ用ロボット現場検証委員会 災害調査部会 部 会 長 高橋 弘 東北大学大学院 教授 委 員 油田 信一 芝浦工業大学 特任教授 委 員 栗栖 正充 東京電機大学 教授 委 員 大須賀 公一 大阪大学大学院 教授 委 員 萬徳 昌昭 (一財)砂防・地すべり技術センター 企画部長 委 員 大久保 均 (一社)建設コンサルタンツ協会 土質地質専門委員 委 員 岩見 吉輝 国土交通省 総合政策局公共事業企画調整課 施工安全企画室長 委 員 藤兼 雅和 国土交通省 水管理・国土保全局防災課 首都直下地震対策官 委 員 西井 洋史 国土交通省 水管理・国土保全局砂防部保全課 保全調整官 委 員 吉田 敏晴 国土交通省 道路局国道・防災課 道路防災対策室長 委 員 石塚 忠範 (独)土木研究所 土砂管理研究グループ 上席研究員 委 員 藤野 健一 (独)土木研究所 技術推進本部 主席研究員 委 員 岡本 健太郎 経済産業省 製造産業局産業機械課 課長補佐 委 員 加藤 晋 (独)産業技術総合研究所 知能システム部門 グループ長 委 員 生井 達朗 (独)新エネルギー・産業技術総合開発機構 ロボット・機械システム部 主査 委 員 天野 久徳 消防庁消防研究センター 特別上席研究官 11
© Copyright 2025 Paperzz