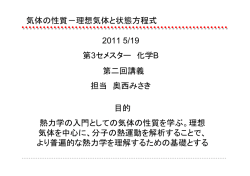
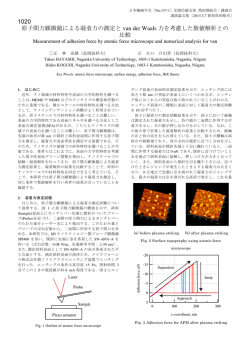
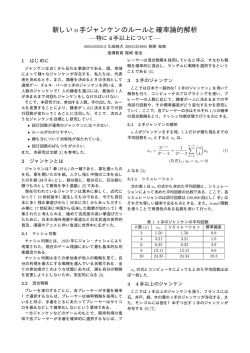
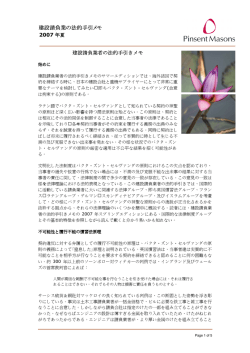
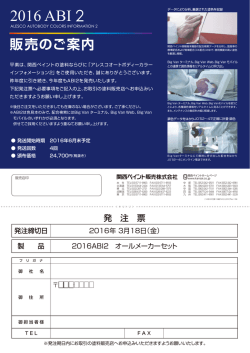
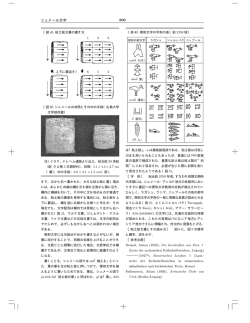
講義内容 自己組織化と社会的インタラクション 序 複雑システム数理2007オリエンテーション 1 イントロダクション 1.イントロダクション 複雑システム数理2007 複雑システム数理 2007 Y hihi Yoshihiro Mi Miyake k Tokyo Institute of Technology E-mail: miyake@dis.titech.ac.jp URL: http://www.myk.dis.titech.ac.jp 第7回 第1部 非線形システムと自己組織化の基礎 自己組織化システム 2.自己組織化とシナジェティックス 3.スレービング原理とオーダーパラメタ方程式 時間的 空間的 タ ン形成(小テ ) 4.時間的・空間的パターン形成(小テスト1) リズムとエントレインメント 5.ホップ分岐とリミットサイクル・カオス 6.リズムの位相記述 7.エントレインメントの数理(小テスト2) ⒸDominik Mentzos 講義の目標 自己組織化と社会的インタラクション 複雑システムの特徴である相互作用(インタラクション)に注目 してその解析及び合成に関する数理的な方法論について講義す る。このようなシステムの特徴である非線形性と開放性に着目し て、秩序(パターン)形成機構としてのシナジェティクスやエントレ インメントなど自己組織化についての基礎を解説する。さらに、こ イ な 自 組織化 基礎を解説する。さ 、 れらを踏まえて、人間の身体的インタラクションや心理的インタラ クションのモデル化を進め、最終的には社会的コミュニケーション との関連を踏まえ、その支援技術について紹介する。 講義内容 第2部 人間のインタラクションのモデル化 身体的インタラクション 8.身体的インタラクションの基盤 9.脳・身体系としての協調運動のモデル化(小テスト3) 心理的インタラクション 10.認知的インタラクションの基盤 11.心理的タイミング協調としてのモデル化(小テスト4) 第3部 社会的コミュニケーションへの展開 コミュニケーション支援 12.インタフェースとメディア技術の現状 13.共創コミュニケーションへの展開(レポート1) 1 講義内容と評価 第3部 社会的コミュニケーションへの展開(つづき) 事例紹介 14.事例紹介1 15.事例紹介2 (レポート2) 上記はあくまでも予定ですので細部は変更する可能性があります。 講義内容(第7回) 第1部 第 部 非線形システムと自己組織化の基礎 リズムとエントレインメント リミットサイクルの例 Belousov-Zhabotinsky反応 1951年、ロシアの科学者、B. 1951年 ロシアの科学者 B P. P Belousovが B l が 生物の代謝経路(クエン酸回路/TCA回路) を模倣した化学反応系を考案し、実験を行っ たところ、溶液の色が時間的に振動すること を発見した。ところが、この現象は当時の常 識では考えられないことで、認められなかっ た。1964年になって、同じくロシアのA. M. Zhabotinskyが追試を行い、この現象が正し いことを確認、さらに、1970年頃には、この 化学反応溶液を静かに置いておくと、同心 円状のパターン(ダーツ等の的のように見え ることからtarget patternと呼ばれる)が発見 された。二人の名前をとってこの反応は Belousov-Zhabotinsky反応と呼ばれる。 リミットサイクルの例 Belousov-Zhabotinsky反応 BrO3− + Br − + 2 H + → HBrO2 + HOBr HBrO2 + Br − + H + → 2 HOBr 7.ホップ分岐とリミットサイクル BrO3− + HBrO2 + H + → 2 BrO2 + H 2O 7-1) リミットサイクルの例 Ce3+ + BrO2 + H + → Ce 4+ + HBrO2 7 2) 線形安定性解析とホップ分岐 7-2) 2 HBrO2 → BrO3− + HOBr + H + 7-3) シミュレーション nCe 4+ + BrCH (COOH ) 2 → nCe 3+ + Br − + Finalproducts 自己触媒反応(非線形性) 京都大学・吉川研究室 スターラーで攪拌しながら観察すると、 赤い状態(還元状態:Ce3+)と青い状態 (酸化状態:Ce4+)を交互にとる。 2 リミットサイクルの例 リミットサイクルの例 Belousov-Zhabotinsky反応 ブリュッセレーターモデル BZ反応の溶液をメンブランフィルター(目の細かいろ紙のようなもの)に染み 込ませ静かにおいておくと、左図のようなパターン(target pattern)が見られ る。酸化状態の部分がだんだんと伝播していくように見える。次にこのパター ンの一部を撹乱する。この反応溶液に銀線を当てると酸化状態になり、鉄線 を当てると酸化状態になりにくくなる。これらの現象を利用して、連続している 波の面を壊すことにより、パターンは螺旋型に変化する(spiral pattern)。 Y X Y 12 dX = A − ( B + 1) X + X 2Y dt dY = BX − X 2Y dt ( A = 1 B = 5) 12 10 10 8 8 6 6 4 4 2 2 X 0 リミットサイクルの例 10 20 30 40 50 60 70 80 90 100 0 0 2 4 6 8 10 12 リミットサイクルの例 ブリュッセレーターモデル A,Bを初期物質、Eを最終物質とし、 A Bを初期物質 Eを最終物質とし AとBから最終物質Eに変換される途 中の中間生成物をXとYとする。AとB は常に外部から補われEは外部に取 り除かれるとする。このときBZ反応 の、色の異なる状態がそれぞれX ( Ce3+ )とY( Ce4+ )に対応する。 0 神経系における振動現象:反響回路 A→ X X + B →Y 2 X + Y → 3X X →E 小脳核と橋核などの小脳前核の間での興奮性結合においては、インパ 小脳核と橋核などの小脳前核の間での興奮性結合においては インパ ルスの循環が観察されている Tsukahara, Bando & Kiyohara, 1973, Brain Res., 40, 67-71 dX 自己触媒反応 = A − ( B + 1) X + X 2Y dt dY = BX − X 2Y 非線形性 dt 3 リミットサイクルの例 神経系における振動現象:第1次視覚野 Gray, Charles M., Gray M Peter Konig, Konig Andrease K. K Engel, Engel and Wolf Singer; "Oscillatory Oscillatory Responses in Cat Visual Cortex Exhibit Inter-Columnar Synchronization which Reflects Global Stimulus Properties;" Nature, vol. 338, pp. 334-337; 1989 リミットサイクルの例 神経振動子モデル 定常 定常入力 du1 = −u1 + w12 x(u2 ) + w11 x(u1 ) + u01 dt du2 = −u2 + w21 x(u1 ) + u02 dt x(u ) = 興奮性結合 抑制性結合 1⎧ ⎛u⎞ ⎫ ⎨tanh⎜ ⎟ + 1⎬ 2⎩ ⎝λ⎠ ⎭ 自己回帰結合 リミットサイクルの例 母子コミュニケーション における音声リズムと 身体運動の引き込み Condon WS, Sander LW, Neonate movement is synchronized with adult speech; Interactional participation and language acquisition, Science 183, 99-101 (1974) リミットサイクルの例 神経振動子モデル u2 Ⅱ Ⅰ(w12+ w11 + u01, w21+u02) w21+u02 Ⅰ Ⅳ(w11+u01, w21+u02) u1 0 u02 Ⅱ(w12+u01, u02) Ⅲ Ⅲ(u01, u02) Ⅳ 4 講義内容(第7回) 線形安定性解析 まず、式[7-1]の平衡解を求める。 第1部 第 部 非線形システムと自己組織化の基礎 リズムとエントレインメント dX/dt=dY/dt=0 dX/dt dY/dt 0 を満たす平衡点を(X0, Y0)とすると、それは下記の )とすると それは下記の 条件を満たす。 F ( X 0 , Y0 ) = G ( X 0 , Y0 ) = 0 7.ホップ分岐とリミットサイクル [7-2] このとき平衡点近傍での安定性を調べるために、(X0, Y0)のまわり での微小変位を (x, y)とすると、次のようになる。 7-1) リミットサイクルの例 7 2) 線形安定性解析とホップ分岐 7-2) 7-3) シミュレーション X = X0 + x Y = Y0 + y [7-3] この式[7-3]を式[7-1]に代入し、x と y に関して展開し平衡解のま わりで線形化することで、安定性を調べる。 線形安定性解析 線形安定性解析 線形安定性解析 リミットサイクルの生成機構を調べるためには、分岐パラメ リミットサイクルの生成機構を調べるためには 分岐パラメータの変化 タの変化 に伴って、安定平衡点が不安定化しリミットサイクルに分岐する過程を 解析する必要がある。ここでは線形安定性解析の手法を用いることで、 それを行う。 2自由度の自律系を一般的に扱うために、以下のような表記を用いる。 特に、 F と G は、X と Y に関する非線形関数である。これは、BZ反応 のブリュッセレーターモデル、神経振動子モデル、van der Pol 方程式な どを含む一般的な形式でもある。 dX = F ( X ,Y ) dt dY = G( X , Y ) dt [7-1] 平衡点(X0, Y0)のまわりでx と yに関して展開すると、以下の ようになる。 d ( X 0 + x) = F ( X 0 + x, Y0 + y ) dt ∂F ∂F x+ = F ( X 0 , Y0 ) + [7-2]式より0 ∂Y ∂X X = X 0 [7-4] y + h.o. Y =Y0 d (Y0 + y ) = G ( X 0 + x, Y0 + y ) [7-5] 高次項 dt ∂G ∂G y + h.o. x+ = G ( X 0 , Y0 ) + ∂Y Y =Y0 ∂X X = X 0 5 線形安定性解析 線形安定性解析 ここで 平衡点(X0, Y0)からのずれ x と y は充分小さいので、2次以 上の項を無視することができ、下記のような線形化された関係が 上の項を無視する とができ、下記のような線形化された関係が 得られる。 dx = ax + by dt dy = cx + dy dt [7-6] ∂F ∂X ,b = X =X0 ∂F ∂Y ,c = Y =Y0 a−λ c b d −λ =0 ∂G ∂X ,d = X =X0 ∂G ∂Y Y =Y0 [7-7] λ2 + pλ + q = 0 [7-12] 線形安定性解析 したがって、平衡点(X0, Y0)の安定性の問題は、線形化された方程 式[7-6]の解の安定性の問題に帰着する。そこで解を下記のように 式[7 6]の解の安定性の問題に帰着する。そ で解を下記のように おくと、 [7-8] 固有値λが実数の場合は、以下のようになる。 p2>4q のとき固有値は実数となる。このとき以下の3つの場合 に分類できる。 (1) p>0, q>0 のとき λ1<0, λ2<0 方程式[7-6]は以下のように表すことができる。なお、λは特性方 程式の解(固有値)に対応する 程式の解(固有値)に対応する。 ⎛ x ⎞ ⎛ a b ⎞⎛ x0 ⎞ ⎟⎟⎜⎜ ⎟⎟ λ ⎜⎜ 0 ⎟⎟ = ⎜⎜ ⎝ y0 ⎠ ⎝ c d ⎠⎝ y0 ⎠ [7-11] 表記を簡単にするために、p=-(a+d), q=ad-bc とおき、下記の式 にもとづいて固有値を分類する。 線形安定性解析 ⎛ x ⎞ ⎛ x0 ⎞ ⎜⎜ ⎟⎟ = ⎜⎜ ⎟⎟ exp λt ⎝ y ⎠ ⎝ y0 ⎠ [7-10] このλの値は次の特性方程式の解として与えられる。 f (λ ) = λ2 − (a + d )λ + ad − bc = 0 ただし、a, b, c, d は以下のとおりである。 a= このとき固有値λは以下の計算によって与えられる。 [7-9] 安定結節点(stable node) (2) p<0, q>0 のとき λ1>0, λ2>0 不安定結節点(unstable node) (3) q<0 のとき λ1<0, λ2>0 鞍点(saddle) 6 線形安定性解析 ホップ分岐 リミットサイクルを生じる最も簡単な例 固有値λが複素数の場合は、以下のようになる。 p2<4q のとき固有値は複素数となる。このとき以下の3つの 場合に分類できる。 (1) p>0 のとき Re(λ) <0 安定焦点(stable focus) dX =Y dt dY = −ω 02 X + ( μ − X 2 )Y dt (2) p<0 のとき Re(λ) >0 不安定焦点(unstable focus) (3) p=0 のとき Re(λ) =0 渦心点(center) μ が分岐パラメータになる 線形安定性解析の例 Van der Pol 方程式の場合であれば、下記のようになる。 方程式の場合であれば 下記のようになる q stable focus F ( X ,Y ) = Y 4q=p2 G ( X , Y ) = −ω 02 X + ( μ − X 2 )Y [7-13] このとき平衡点(X0, Y0)は、式[7-2]に基づいて計算される。 center stable node p 0 saddle μ < X 2 :正抵抗 ホップ分岐 平衡点近傍での安定性と不安定性(まとめ) unstable node μ > X 2 :負抵抗 この項がないときには単振動になる 線形安定性解析 unstable focus van der Pol 方程式は RC回路にトンネルダイオードが加わった場合 を記述する。トンネルダイオードによって、変位 X が小さいときは負 抵抗となり変位は増加するが、変位 X が大きい時は正抵抗になり 変位は減少する。これによってリミットサイクルとしての非線形振動 が自己組織される。 saddle F ( X 0 , Y0 ) = G ( X 0 , Y0 ) = 0 [7-2] したがって、平衡点(X0, Y0)は、 ( X 0 , Y0 ) = (0,0) [7-14] 7 ホップ分岐 ホップ分岐 平衡点(X0, Y0)の近傍における線形化方程式の係数は以下 のようになる。 a= c= ∂F ∂X = 0, b = X =X0 ∂G ∂X ∂F ∂Y = −ω 02 , d = X =X0 Hopf 分岐 =1 Y =Y0 ∂G =μ ∂Y Y =Y0 ホップ分岐を経てリミットサイクルへ Im [7-15] λ= ( 1 μ + μ 2 − 4ω 02 2 ) μ =0 stable focus unstable focus μ <0 μ >0 0 したがって、線形化された方程式は下記のように得られる。 dx =y dt dy = −ω 02 x + μy dt λ∗ = [7-16] ホップ分岐 ( 1 μ − μ 2 − 4ω 02 2 ) Re μ =0 講義内容(第7回) このとき固有値は下記の特性方程式から求められる。 第1部 第 部 λ2 − μλ λ + ω 02 = 0 これを解いて λ= ( 1 μ ± μ 2 − 4ω 02 2 [7-17] ) [7-18] 非線形システムと自己組織化の基礎 リズムとエントレインメント 7.ホップ分岐とリミットサイクル ここでμを分岐パラメータとすると、 7-1) リミットサイクルの例 (1) μ< 0 のとき μ~ 0 ならば Re(λ)< 0 かつ μ2-4ω02< 0 Æ 安定焦点 (2) μ= 0 のとき Re(λ)= 0 かつ μ2-4ω02< 0 Æ 渦心点 (3) μ> 0 のとき μ~ 0 ならば Re(λ)> 0 かつ μ2-4ω02< 0 Æ 不安定焦点 7 2) 線形安定性解析とホップ分岐 7-2) 7-3) シミュレーション 8 シミュレーション シミュレーション 安定平衡点のまわりでの状態の時間発展( μ = -3.0) van der Pol 5 20 3 15 15 10 2 10 1 5 1 5 0 0 0 Y X 収束が速い Y 20 平衡点 0 -1 -5 -1 -5 -22 -10 10 -2 2 -10 10 -3 -15 -3 -15 -4 -20 -4 0 5 10 15 20 25 Time 30 35 40 45 -25 -5 50 -5 -4 -3 -2 -1 0 X 1 2 3 4 5 シミュレーション -20 0 5 10 15 20 25 Time 30 35 40 45 -25 -5 50 van der Pol van der Pol 25 20 3 15 15 収束が遅い 5 0 0 Y 10 5 Y 10 1 -5 -5 -22 -10 10 -10 10 -3 -15 -15 -4 -20 5 10 15 20 25 Time 30 35 40 45 -1 0 X 1 2 3 4 5 50 -25 -5 van der Pol (3.5, 18) (-4, 15) (1, 1) 0 -1 0 -2 25 20 -5 -3 リミットサイクルと初期条件の関係( μ = 3.0) 4 2 -4 シミュレーション 分岐点の近傍における状態の時間発展( μ = 0.02) 5 リミットサイクル van der Pol 25 収束が速い 3 -5 X van der Pol 5 4 2 X van der Pol 25 4 リミットサイクルにおける状態の時間発展( μ = 3.0) -20 -4 -3 -2 -1 0 X 1 2 3 4 5 -25 -5 -4 -3 -2 -1 0 X 1 2 3 4 5 9 シミュレーション シミュレーション 線形振動と初期条件の関係 線形振動と外乱の関係 Harmonic 25 (1.0, 0) 3 15 2 10 5 1 5 0 0 (2.0, 0) X -5 (3.0, 0) -10 10 Y 20 10 0 -1 -5 -2 -10 -15 -3 -15 -20 -4 -25 -5 -4 -3 -2 -1 0 X 1 2 3 4 5 -5 Harmonic 25 4 15 Y Harmonic 5 20 -20 0 5 10 15 20 25 Time 30 35 40 45 50 -25 -5 -4 -3 -2 -1 0 X 1 2 3 4 5 シミュレーション リミットサイクルと外乱の関係( μ = 3.0) van der Pol 20 3 15 2 10 1 5 0 -5 -22 -10 -3 -15 -4 Thank you! 0 -1 -5 van der Pol 25 4 Y X 5 -20 0 5 10 15 20 25 Time 30 35 40 45 50 -25 -5 -4 -3 -2 -1 0 X 1 2 3 4 5 10 小テスト(第2回) ブリュッセレーターモデルに関する下記の問いに答えよ。 1)平衡点を求めよ。ただし )平衡点を求めよ ただ A>0 とする。 とする 2)平衡点近傍での線形化方程式に変換せよ。 3)特性方程式と固有値を求めよ。 4)分岐パラメータ B に依存した平衡点の局所安定性を分類せよ。 5)それぞれの場合における平衡点近傍での解軌道を図示せよ。 6)ホップ分岐となる分岐点 Bc を求めよ。 dX = A − ( B + 1) X + X 2Y dt dY = BX − X 2Y dt 11
© Copyright 2025 Paperzz