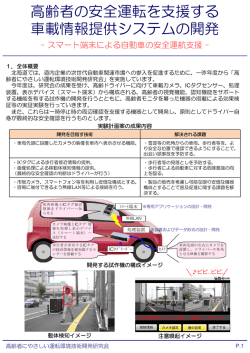
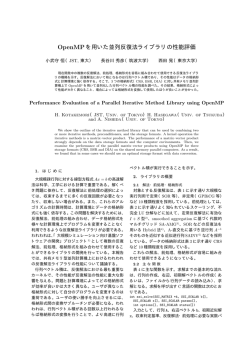
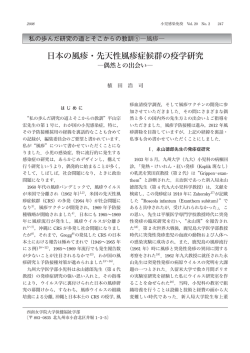
2009.9.2 千葉工大説明会 R GISモジュールおよび地図編集 R‐GISモジュ ルおよび地図編集 講習会 株式会社 環境GIS研究所 1 本日の流れ 場所:千葉工業大学 津田沼キャンパス 8号館8階 9月2日10:30~ 1.GIS概念の説明(20分) g p 2.RgisOperatorの説明(45分) 1)モジュールの概要 2)モジュールの使い方説明 3.質疑応答、モジュール利用計画に関するディスカッション(30分) (昼休み) 4.GIS地図編集方法の概要(30分) 1)地図編集フロー 2)各作業項目の解説 (休憩:必要に応じてセットアップ等の準備) 5.ArcGISおよび千葉工大データを用いた地図編集作業の実習(90分) 1)障害物レイヤーの作成 2)移動コストレイヤの作成 2 GISの概念 概念 3 GIS(Geographic Information System)とは GIS(地理情報システム)は GIS (地理情報システム)は • • • 空間的な情報を、空間的な関連を含めて管理 分析 可視化 共有するための仕組み 空間的な情報を、空間的な関連を含めて管理・分析・可視化・共有するための仕組み 地図的な可視化により情報の把握や共有が容易 地図を効果的に扱うための、知見やノウハウが豊富 4 ①空間データベース構造 7 データ構造 基本 基本的なGISデータの構造 • ベクトルデータ ベク デ タ – ポイント (x,y,z x,y,z) ) (x,y,z xx,y,z) y z) z) (x,y,z xx,y,z) y z) z) – ポリライン (x,y,z x,y,z) ) (x,y,z x,y,z) ) (x,y,z x,y,z) ) – ポリゴン (x,y x,y) ) (x,y,z x,y,z) ) セルサイズ セ サイズ (x,y,z x,y,z) ) • ラスタ(グリッド) (x,y,z x,y,z) ) セル値 セル数 ポイント・ポリライン・ポリゴンを合わせてベクトルデータと呼ぶ ポイント・ポリライン ・ポリゴンを合わせてベクトルデータと呼ぶ データ構造 応用 さまざまな事象を扱うためデータモデル • • • • • トポロジー(位相構造) ポ ジ (位相構造) ネットワーク TIN 3D 4D ②空間参照系 地球は完全な球体ではない。楕円体で近似。 • ジオイドモデル ジオイド デ ・回転楕円体 転楕 体 近似 http://www http:// www‐‐app2.gfz app2.gfz‐‐potsdam.de potsdam.deより引用 より引用 Winkipediaより引用 座標参照系 座標系と地球上の位置を組み合わせるための仕組み • 座標参照系(CRS) 座標参照系( ) – 原子(Datum) – CS(Coordinate System CS( Coordinate System)):座標軸や距離単位からなる数学 的に定義された座標 • 準拠楕円体 Datum::CS Datum CSを地球の表面の座標として結びつけるための を地球の表面の座標として結びつけるための • 重心位置のずれ具合 もの。曲面である地球に結びつけるため 測地学的な手法が利用される – (地心直行座標系) 測地学的な手法が利用される。 CRS(Coordinate Reference System) Reference System)::CS CSと とDatum Datumの組み合 の組み合 座標系(CS) わせを結び付けたもの。 ・Geographic Geographic::地球を楕円体・球体としてモデル化し、 • 原点の場所 緯度経度で表す。 • 数値の単位 ・Geocentric Geocentric::地心直行座標系。地球の局面の問題 を避けるため人工衛星座標にも利用しやすい。 • 軸の傾き ・Projected Projected::Geographic Geographicな なCRS CRSに基づき CRSに基づき、地球曲面を に基づき 地球曲面を に基づき、地球曲面を • 投影法(※Projected CRS) 平面に近似(投影)した座標系を利用するもの。歪を 持つ。 ・Engineering: Engineering:ローカルな意味を持つCRS。地球表 ローカルな意味を持つCRS。地球表 面固定システムと移動体座標に分類 標高 高さには複数の意味がある。 • 楕円体高・・・HE 楕 体高 • ジオイド高・・・H(標高) – ※ジオイド重力の等ポテンシャル面 国土地理院より引用 座標参照系の分類(イメージ)センサ群のCS 群 GISの座標参照系とロボットの座標参照系の接点 GIS の座標参照系とロボットの座標参照系の接点 (Local CS) Geographic CRS 地理座標系(世界通用CRS) R-GISで機能実装 L CSLRF L-CS L CScamera L-CS World CRS ロボット群座標系(ロボット間の共有CRS) ( ボ ト間 共有 ) Local CRS ロボット座標系(自分だけの移動体CRS) (自分だけの移動体C S) L-CSarm ロボットのCRSLRF L-CShan L-CSwheel ※World CRS :(種別はGeographic CRSまたはEngineering CRS。屋内外など複数のWorld CRSのネスティングもあり得る) ※World CRS=Local CRSもあり得る 13 座標変換 変換の種類によってパラメータや計算式は異なる • 連結座標演算 – 原子1+座標系A → 原子2+座標系B • 座標系も準拠楕円体も変換するような場合 • 座標変換(Transformation): 座標変換( ) – 原子1+座標系A → 原子2+座標系A • 座標系は同じだが、異なる準拠楕円体に座標を変換する場合 • Tokyo→WGS85 T k WGS85 • 座標換算(Conversion): – 原子1+座標系A → 原子1+座標系B • 準拠楕円体は同じだが、異なる座標系に変換するような場合。 準拠楕円体は同じだ 、異なる座標系 変換するような場合。 • 19座標系→UTM座標系 パラメータの定義 EPSG Geodetic Parameter Dataset データセットの内容(2009年2月10日版) デ タ 内容( 年 月 版) • CS(90種) • Datum(535種) • CRS(3720種) • 座標変換式(1448種) • 距離単位(78種) 距離単位( 種) ※各種内容が重複しないようユニークなコードを管理 EPSG ::European Petroleum Survey Group EPSG ③GIS空間処理機能 16 ジオ・サーチ 空間的な検索 ある地物に対し 一定の距離に含まれる 完全に含む 重心がある 線分を共有する 境界線に接する 正確に 致する 正確に一致する 境界線が横切る 含む・含まれる 2D検索 3D検索 ジオ・プロセッシング 空間的な処理 U i Union Linear Directional Mean Buffer Cost Distance N Near 移動ロボット向けの地図提供イメージ ポテンシャルグリッドと最短経路 目的地 自己位置 19 移動ロボット向けの地図提供イメージ ネットワーク検索結果・・・(開発中) 経路の頂点 座標を送る 目的地 障害物情報 自己位置 20 ロボット向けGIS ロボット向け GISと従来の と従来のGIS GISの違い の違い 従来のGIS 従来の GISでは対応しきれないロボット固有の要求 では対応しきれないロボット固有の要求 課題 従来のGISの地図 移動ロボットの地図 対象地物 範囲 静的環境 広域(シームレスな地図管理) 静的環境+動的環境 局所域(主にロボット周辺) データ更新頻度 比較的長期間隔 (年単位 月単位) (年単位,月単位) リアルタイムな環境変化 に応じた更新 時間の取り扱い 年月日または時刻単位 過去のある時点・期間 ミリ秒単位 (センサデータ取得頻度) 処理速度要求 位置精度 遅い(数秒~数分) 縮尺レベルに応じた精度 リアルタイム処理 数cm単位の精度 位置・属性データの 位置 属性デ タの 確度の扱い方 決定的 確率的 利用者 人間 ロボット(制御アルゴリズム) 座標系 地理座標系 主にローカル座標系 (GPS等の地理座標系も併用) 21 RGIS‐Operatorの解説 解説 ~配布マニュアル参照~ 22 ArcGISを用いた地図編集 23 地図データの一般的な作り方 24 Topic:GISデータの作り方① 測量業者・・・ベースマップの整備 • 測地測量 • 地形測量 • 工事測量 三角点 インテリジェント基準点 地形測量 写真測量 丁張測量 Topic:GISデータの作り方② GIS利用者・・・必要な地物(Feature GIS利用者・・・必要な地物( Feature)をベースマップ上に登録 )をベースマップ上に登録 ・マップデジタイズ プデジタイズ ②ジオリファレンス ③データ入力&属性付与 ①データリソース 紙地図 CADデ CADデータなど CAD デ タなど データなど 用途:住宅 構造:木造 面積:○㎡ 所有者:△ ・フィールドマッピング GIS Database R‐GIS用地図編集作業のアウトライン ①素材となる地図情報の入手 • CADデ CADデータの場合→Shapeファイルに変換(内容が正確であればCADデータの方が◎) タの場合→Shapeファイルに変換(内容が正確であればCADデ タの方が◎) • 紙図面の場合→大判スキャニング(400dpi) ②地図リソースに公共座標の登録(幾何補正) ②地図リソ スに公共座標の登録(幾何補正) • 地図記載の場合→内容を確認し、利用 • 未知の場合→調査・測量 • 幾何補正処理 幾何補 処 ③新規GISデータの作成(障害物ポリゴン、コストポリゴン) • 座標系設定 • 属性定義 ④障害物、コスト情報の入力 • 地図リソースのトレース • 現場に応じた修正(本日の実習内容) • R‐GIS用Shapeファイルの完成 27 ①素材となる地図データの入手 • ロボットを移動させる施設の管理者から竣工 図を入手 • マップデジタイズによりGISデータの作成 • マップの内容や座標系を確認 28 キャンパス全体配置図 29 新1号館 高層棟1F平面図 30 参考:地図リソースサンプル 31 ⑤地図データの普及 付加価値の高い地理情報サービス 付加 価値の高い地理情報サービス • 国・地方自治体のデータ 国 地方自治体 デ タ – 国土基盤地図情報 – 自治体内のGISデータ(都市計画図、道路台帳など) • 民間企業の地図データ – – – – 住宅地図データ 航空写真データ 道路地図デ タ 道路地図データ 道路ネットワークデータ 都市計画 本図( / 都市計画基本図(1/2500地形図) 形図) 33 基盤地図情報2500 34 縮尺:1/100~1/250 設計図・竣工図(建てる前の図面と、建てた後に測った図面) 35 現地調査・測量 設計図と竣工後の違い 36 航空写真・高解像度衛星写真 37 民間住宅地図 38 ルートデータ(道路) Orkney社製 ルート検索用道路データ z北海道地図株式会社が提供する、DRM(財団法人日本デジタル道路地 図協会)互換の1/25000道路ネットワークデータ zpgRouting仕様のShapeファイルフォーマット zサーバー数単位でライセンスされ、全国利用時に50万円、地方単位15 万円、都府県単位5万円。 z最大年2回更新 ESRIジャパン社製 ArcGISデータコレクション プレミアムシリーズ(道路網) z住友電気工業株式会社の拡張版全国デジタル道路地図データベース (ADF)を加工して開発した全国道路ネットワークデータセット zArcGIS Networkモジュールですぐに利用可能な構築済みのネットワーク データセット z交差点における右左折禁止(主要道路のみ)や一方通行などの交通規制 情報 zチューニング済み所要時間・階層構造・ディレクション(道案内)対応 z更新頻度 年1回予定 z希望販売価格 180,000円(都府県版)~ 39 Topic2:精度について Topic2 :精度について 公共測量作業規定 • 測量 測量の内容や成果物の縮尺に応じて、求められる位 内容や成果物 縮 応じ 求められる位 置精度が規定されている。 • GISでは拡大縮小が任意であり GISでは拡大縮小が任意であり、デ データそのものに縮 タそのものに縮 尺は無いので、縮尺レベルと呼び方で区分する。 Topic3:空間データの品質要素 Topic 3:空間データの品質要素 多面的な視点から空間データの品質を評価する R‐GIS用地図編集作業のアウトライン ①素材となる地図情報の入手 • CADデ CADデータの場合→Shapeファイルに変換(内容が正確であればCADデータの方が◎) タの場合→Shapeファイルに変換(内容が正確であればCADデ タの方が◎) • 紙図面の場合→大判スキャニング(400dpi) ②地図リソースに公共座標の登録(幾何補正) ②地図リソ スに公共座標の登録(幾何補正) • 地図記載の場合→内容を確認し、利用 • 未知の場合→調査・測量 • 幾何補正処理 幾何補 処 ③新規GISデータの作成(障害物ポリゴン、コストポリゴン) • 座標系設定 • 属性定義 ④障害物、コスト情報の入力 • 地図リソースのトレース • 現場に応じた修正(本日の実習内容) • R‐GIS用Shapeファイルの完成 42 ②地図リソースに公共座標の登録(幾何補正) •公共座標を用いた図面の幾何補正 •境界杭座標等を補正用基準点として 境界杭座標等を補正用基準点として 利用(画地測量図等に記載) •なければ現地測量 •ロボットによっては任意座標系(公共 座標でない座標)でもよい ArcGISのツール • • 地図が画像データの場合、「ジオリファレンスツール」 CADデータの場合、Shapeファイルに変換してから「アジャストツール」 デ タの場合 イ に変換してから「アジ トツ ヒント • GISで東西方向をX軸、南北方向をY軸で扱う。 – 測量図面ではX,Yが逆の場合がある。 43 ジオ・リファレンス ジオ ・リファレンス 座標の登録・座標変換 R‐GIS用地図編集作業のアウトライン ①素材となる地図情報の入手 • CADデ CADデータの場合→Shapeファイルに変換(内容が正確であればCADデータの方が◎) タの場合→Shapeファイルに変換(内容が正確であればCADデ タの方が◎) • 紙図面の場合→大判スキャニング(400dpi) ②地図リソースに公共座標の登録(幾何補正) ②地図リソ スに公共座標の登録(幾何補正) • 地図記載の場合→内容を確認し、利用 • 未知の場合→調査・測量 • 幾何補正処理 幾何補 処 ③新規GISデータの作成(障害物ポリゴン、コストポリゴン) • 座標系設定 • 属性定義 ④障害物、コスト情報の入力 • 地図リソースのトレース • 現場に応じた修正(本日の実習内容) • R‐GIS用Shapeファイルの完成 45 ③新規GISデータの作成(障害物ポリゴン、コストポリゴン) • • • • フィーチャタイプ:ポリゴン 空間参照:平面直角座標系(19系)‐JGD2000 空間参照:平面直角座標系(19系) JGD2000 第9系(今回の場合) 障害物レイヤ:属性不要 [ ] コストレイヤ:フィールド名[任意],整数3桁(1から254) 46 空間参照(CRS) 座標系 • 平面直角座標系 直角座標系 • 地理座標系(経緯度)→GPSの出力(WGS84) • UTM座標系 測地系 • 旧測地系(旧日本測地系、Tokyo) 旧測地系(旧日本測地系 Tokyo) • 新測地系(世界測地系、JGD2000)≒WGS84 • 空間参照=座標系+測地系 47 平面直角座標系(平成十四年国土交通省告示第九号) 系番号 I 原点経度 原点緯度 適用区域 129度30分0 33度0分0秒 長崎県 鹿児島県のうち北方北緯32度南方北緯27度西方東経128度18分東方東経130度を境界線とす 0000 秒0000 る区域内にあるすべての島、小島、環礁及び岩礁 II 131度 0分 33度0分 福岡 佐賀 熊本 大分 宮崎 鹿児島 III 132度10分 36度0分 山口 島根 広島 IV 133度30分 33度0分 香川 愛媛 徳島 高知 V 134度20分 36度0分 兵庫 鳥取 岡山 VI 136度 0分 36度0分 京都 大阪 福井 滋賀 三重 奈良 和歌山 VII 137度10分 36度0分 石川 富山 岐阜 愛知 VIII 138度30分 36度0分 新潟 長野 山梨 静岡 IX 139度50分 36度0分 東京 福島 栃木 茨城 埼玉 千葉 群馬 神奈川 X 140度50分 40度0分 青森 秋田 山形 岩手 宮城 XI 140度15分 44度0分 小樽 函館 伊達 北斗(の各市) XII 142度15分 44度0分 札幌 旭川 稚内 留萌 美唄 夕張 岩見沢 苫小牧 室蘭 士別 名寄 芦別 赤平 三笠 滝川 砂 川 江別 千歳 歌志内 深川 紋別 富良野 登別 恵庭 北広島 石狩(の各市) XIII 144度15分 44度0分 北見 帯広 釧路 網走 根室(の各市) XIV 142度 0分 26度0分 XV 127度30分 26度0分 沖縄県のうち東経126度から東であり、かつ東経130度から西である区域 XVI 124度 0分 26度0分 沖縄県のうち東経126度から西である区域 XVII 131度 0分 26度0分 沖縄県のうち東経130度から東である区域 XVIII 136度 0分 20度0分 東京都のうち北緯28度から南であり、かつ東経140度30分から西である区域 XIX 154度 0分 26度0分 東京都のうち北緯28度から南であり、かつ東経143度から東である区域 千葉工大は第9系 東京都のうち北緯28度から南であり、かつ東経140度30分から東であり東経143度から西である区域 48 UTM座標系 千葉工大はZone54N 葉 49 世界測地系と旧測地系 座標のオフセットだけでは変換できないずれ • GPSで計測した座標と旧測地系の図面では約400mずれる。 • 場所ごとに異なるパラメータが必要 ご が • 別ツールの「Tky2JGD」や「JGD2Tky」を利用 50 投影変換・座標換算 • 測地系が同じで、投影法が異なる場合 →ArcToolboxの投影変換(Projection) 投 変換 例)平面直角座標系(新測地系)→経緯度(WGS84) • 投影法が同じで、測地系が異なる場合 →別ツ ルの「Tk 2JGD」や「JGD2Tk 」を利用 →別ツールの「Tky2JGD」や「JGD2Tky」を利用 例)平面直角座標系(旧測地系)→平面直角座標系(新測地系) 51 R‐GIS用地図編集作業のアウトライン ①素材となる地図情報の入手 • CADデ CADデータの場合→Shapeファイルに変換(内容が正確であればCADデータの方が◎) タの場合→Shapeファイルに変換(内容が正確であればCADデ タの方が◎) • 紙図面の場合→大判スキャニング(400dpi) ②地図リソースに公共座標の登録(幾何補正) ②地図リソ スに公共座標の登録(幾何補正) • 地図記載の場合→内容を確認し、利用 • 未知の場合→調査・測量 • 幾何補正処理 幾何補 処 ③新規GISデータの作成(障害物ポリゴン、コストポリゴン) • 座標系設定 • 属性定義 ④障害物、コスト情報の入力 • 地図リソースのトレース • 現場に応じた修正(本日の実習内容) • R‐GIS用Shapeファイルの完成 52 ④障害物、移動コストレイヤの編集 障害物レイヤ • 地図に描かれていない障害物を入力する。 描 れ な 障害物を す – 段差、家具などの物体、通行できない領域 段差、家具な の物体、通行できな 領域 • 地図と異なる障害物の形状を修正する。 移動コストレイヤ • ロボットをできるだけ通行させたくない場所を 入力する。 入力する 53 ArcGISの利用 • ArcMap – 図形と属性の編集 図形と属性 編集 – 地図の表示・印刷(重ね合わせ、主題図) – 条件検索 – 空間解析処理(ArcToolbox) • ArcCatalog – GISデータの管理 • 新規作成・名前変更・移動・複製・削除など – 空間参照の設定 ※投影変換はどちらでも可 54 操作内容 ¾ レイヤの追加・削除 ¾ マップ操作(拡大・縮小・属性表示・テーブル) マップ操作(拡大・縮小・属性表示・テ ブル) ¾ シンボルの設定 ¾ ラベルの表示 ¾ 図形編集(ポリゴンの追加、分割、自動完成、頂 図形編集(ポリ ンの追加、分割、自動完成、頂 点の編集) ¾ スナップの設定、選択可能レイヤの設定 ¾ 属性の入力(個々の入力、複数入力) ¾ 属性の検索とレイヤの別名保存 ¾ ArcToolboxの使い方 ¾ ポイントレイヤからの座標リスト生成 ポ 55 Shapeファイルを構成するファイル群 ShapeファイルとはGISデータのデファクトスタンダードとして普及しているデータ形式の ひとつである。 GISデ タ(Shapeファイル)は、拡張子の異なる複数のファイルで構成されている。 GISデータ(Shapeファイル)は、拡張子の異なる複数のファイルで構成されている。 部分的に編集したり、削除するとGISデータとして利用できなくなる。 ファイルをコピーする場合、ArcCatalogを利用するかExplorerで必須ファイルをセットで 操作する。 • ○○○.shp : 形状情報を格納 • ○○○.dbf : 属性情報を格納 • ○○○.shx : インデック情報を格納 3つの必須ファイル 9同じ名称 9同じフォルダ • ○○○.prj : 投影法等CRS情報を格納 • 他 56 地図編集上のTips • 編集ツールを使いこなすためのチュートリア ル →最初のとっつきとしては「ArcMapユーザーズガ →最初のとっつきとしては「A M ユ ザ ズガ イド」が便利 “ArcMap_Tutorial_J.pdf” →デ データ編集:「GISフィーチャの編集」が便利 タ編集:「GISフィ チャの編集」が便利 “Editing_tutorial_J.pdf” • CAD図をベースにする場合はスナップ設定 を活用する。 • ポリゴンの形状を編集するときには、小さな 隙間や重複を生じないようにする。 隙間や重複を生じないようにする →「トポロジ―編集」の活用 • レイヤプロパティのシンボル設定を工夫す ると見やすさUp! 57 ご質問? 株式会社 環境GIS研究所 荒屋 亮 Tel: 092‐631‐6406 E E‐mail: araya@engisinc.com il @ ii R‐GISコンソ シアム: R‐GISコンソーシアム: (財)九州先端科学技術研究所、(株)環境GIS研究所 58
© Copyright 2025 Paperzz