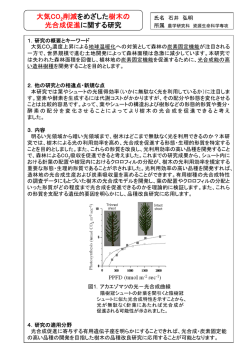
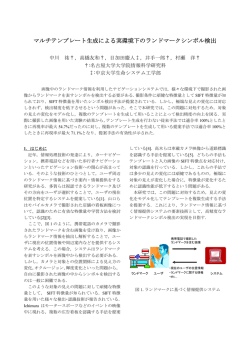
MIRU2015 CONFIDENTIAL EXTENDED ABSTRACT. DO NOT DISTRIBUTE ANYWHERE. 第 18 回画像の認識・理解シンポジウム 色特徴を用いた追い抜き車両の特定 東 龍之介1,a) 榎並 直子2,b) 小篠 裕子3,c) 1. はじめに 入力 現在,車載カメラによる衝突防止や駐車支援などの運転 支援システムが多数実用化されている.画像中に存在する 百合本 瑞規1,d) 有木 康雄2,e) 塗装領域推定 車両領域推定 塗装領域推定 車両特定 塗装領域間の色特徴を比較 車両前方 画像 車両を検出し,同一車両を特定することは重要な機能の一 つである.しかし,多くの車両などの物体特定手法はグラ ディエントベース特徴を用いることが多い.同一車種など 形状が相似している,視点の変化により見えが大きく異な 車両後方 画像 図 1 提案する車両特定の概要. るといった問題が生じる.そこで,本稿では色の恒常性か ら車体の塗装色を特徴として用いる車両特定手法を提案す ピクセルに対し,色インデックスを割り当てることで塗装 る.今回は,追い抜き車両の特定を目的とし,車両の前面 領域を抽出する.車両の特定では,塗装領域から抽出され 画像をクエリ画像とし,複数の背面画像の中から同一の車 た色特徴量の類似度を用いる.候補画像の色特徴集合とク 両画像を特定する.入力された各車両画像から塗装色領域 エリ画像の色特徴集合の類似度としてマハラノビス汎距離 を抽出し,塗装領域から得られた色特徴間の類似度により, と部分空間距離の 2 つを用いた. 車両の前方画像と最も類似した色特徴を持つ車両の背面画 像を選択することで車両の特定を実現する. まずはじめに車体領域の抽出について述べる.車両画像 から SLIC[1] を用いてスーパーピクセルを抽出する.車両 画像の中央に車両領域が存在すると仮定し,車両画像外側 2. 提案手法 に存在するスーパーピクセルを背景領域候補とし,それ以 提案手法の概要について述べる(図 1).車両検出によ 外のスーパーピクセルを車両領域候補とする.各スーパー り,得られたバウンディングボックス内の画像を入力画像 ピクセルの重心座標を算出する.重心座標に対して閾値処 とする.まず初めにバウンディングボックス内から車体領 理を行うことで,スーパーピクセルを背景領域と車両領域 域を抽出する.バウンディングボックス内をスーパーピク に分割する.また閾値は実験的に定めた. セルにより分割し,各スーパーピクセルの重心位置により 次に,塗装領域の抽出方法について述べる.車両画像の 車体領域が得る.抽出された車体領域には,塗装色に加え 車体領域内のスーパーピクセルに対して色クラスとの相関 てランプや窓の領域が存在し車両特定には適さない.その 度により色インデックスを割り当て色ヒストグラムを作成 ため,車体領域から塗装領域のみを抽出する必要がある. する.作成した色ヒストグラムのピーク値を塗装色とし, 塗装領域の抽出には学習データから構築した色クラスとの 塗装色と色特徴が相似している領域を塗装領域とする.色 類似度を用いる.色クラスは学習データの塗装色に対して クラスは人に車両画像の色名をアノテーションしてもらい, 人が色名のアノテーションが行い,塗装色ごとに構築する. 色名ごとに学習データを構築する.学習データは車両画像 構築した色クラスを用いて車両領域から得られたスーパー のボンネット領域から抽出する.色クラスの分布を正規分 布とし,学習データの画素がもつ HLS 値から平均ベクト 1 2 3 a) b) c) d) e) 神戸大学システム情報学研究科 〒 657-8501 神戸市灘区六甲台 町1−1 神戸大学自然科学系先端融合研究環 〒 657-8501 神戸市灘区六 甲台町1−1 国立研究開発法人産業総合研究所(AIST)知能システム研究部 門 〒 305–8568 つくば市梅園 1-1-1 中央第 2 azuma@me.cs.scitec.kobe-u.ac.jp naoko.enami@port.kobe-u.ac.jp yuko.ozasa@aist.go.jp yurimoto@me.cs.scitec.kobe-u.ac.jp ariki@kobe-u.ac.jp ルと,共分散行列を算出し,アノテーションされた色ごと に正規分布を作成し,色クラス Ci とする.領域内の画素 x の各色クラスに対する尤度 p(x|Ci ) を算出し,尤度が最大 となる色クラス Ci のインデックス i を割り当てる.各画 素に対して割り当てられた色インデックスごとにその頻度 を算出し,頻度ヒストグラムを作成する.ビン数は色イン デックス数 (= 5) と同じとする.頻度ヒストグラムのピー クとなる塗装領域の色インデックスとする.次に塗装領域 1 MIRU2015 CONFIDENTIAL EXTENDED ABSTRACT. DO NOT DISTRIBUTE ANYWHERE. 第 18 回画像の認識・理解シンポジウム の色インデックスを用いて,塗装領域を抽出する.塗装領 表 1 SubSpaced 車両領域 30.49 47.99 塗装領域 36.81 46.08 域候補のスーパーピクセル中の画素に対して,同様に色イ ンデックスを割り当てる.塗装領域候補の色インデックス が塗装領域の色インデックスと同じ場合,そのスーパーピ 物体特定結果 (%) Mahalanobis クセルを塗装領域とする. 表 2 物体特定結果 (%) 推定した塗装領域の色特徴量を用いて車両の特定を行う 手法 方法について述べる.クエリ画像 A と候補画像 Bj の色特 塗装領域 SIFT Flow SubSpaced Mahalanobis 41.42 47.99 30.49 徴量の相関度としてマハラノビス汎距離と部分空間距離を 用いる.マハラノビス汎距離を用いた車両特定では,クエ る.また,車両の塗装色の色推定に用いる色クラスの学習 リ画像 A と候補画像 Bj の塗装領域内の画素の HLS 値の には,GRAZ02[3] データセットの車両画像に対して人が マハラノビス汎距離により,車両の特定を行う.各塗装領 色名のアノテーションを行い,さらにボンネット領域を抽 域内の画素を an (n = 0, 1..., N ),bm (m = 0, 1..., M ) とし, 出して作成した学習データを用いた.本実験では,3 車線 次に各画素集合から共分散行列 Σa , Σb を求める.Σa , Σb での追い抜きを想定し,クエリ画像に対する候補画像は正 を用いて,2つの画素集合間の共分散行列 Σ を算出する. 解画像 1 枚と不正解画像 2 枚の計 3 枚で行った.車両の特 Σ を用いてマハラノビス汎距離はを次式により算出する. √ D(an , bm ) = (an − bjm )Σ(an − bm )T (1) 定に対する塗装色から抽出した色特徴量の有効性を評価す さらに,塗装領域内の画素数は候補画像ごとに異なるた め,全画素間のマハラノビス汎距離の平均 Dµ (A, Bj ) を求 める.Dµ (A, Bj )) が長いほど相関は低くなり,短いほど相 関は高くなる.各候補画像間との塗装領域内の色特徴量間 の相関度が最も高い候補画像を特定結果として出力する. 次に部分空間距離を相関度として用いる手法について述 べる.候補画像ごとに部分空間を構築し,部分空間とクエ リ画像との投影距離を候補画像とクエリ画像の色の相関度 として用いる.まずはじめに部分空間を構築するために, 塗装領域のスーパーピクセルを用いて,スーパーピクセル ごとにヒストグラムを作成する.ヒストグラムは,HLS 空 間においてスーパーピクセル内の画素の色値の頻度ヒスト グラム vk とする.次に vk から共分散行列 Rk と平均 v¯k を求める.共分散行列の固有値を大きい順に並べたときの l 番目の固有値を λl とし,λl に対応する固有ベクトルを ul とする.d(= 7) 次元の部分空間の基底ベクトルは上位 d 個の固有ベクトルとなる.入力特徴ベクトルを d 次元の部 ∑n 分空間に射影したときの射影行列を P = k=1 uk uTk とす る.次に次式を用いて Q 個の入力特徴ベクトル qo と部分 空間の類似度 W を求める. W = Q ∑ るために,車両の特定を行い,車両特定率を示した.前面 画像は 17 画像から 1 画像,背面画像は前面画像に対応す る背面画像 1 画像とそれ以外の 2 画像を選択した.1 車両 につき 120 回,計 2040 回の物体特定を実験を行った.車 体領域,塗装領域での精度を算出した.表 1 に各類似度ご とに車両領域と塗装領域を用いて物体特定を行った結果を 示す.次に,色特徴量を用いた車両特定の有効性を示すた めに,2 つの画像間の画素単位の SIFT 特徴量の変化量を 取得できる SIFT Flow[4] 用いた車両の特定率との比較を 行った.SIFT Flow では 2 画像間の違いが小さい程,変化 量が小さくなる.そこで,車両特定では,前面画像と候補 画像の全フローの平均を画像間の相関度とした.塗装領域 はテクスチャが少なく,コントラストが低いため,使用す る領域は,テクスチャの少ない塗装領域ではなく,車体領 域を用いた.表 2 に比較結果を示す.表 2 では色特徴の類 似度に部分空間を用いた手法がもっとも有効であることが わかった. 4. まとめ 本稿では塗装色から抽出した色特徴による車両特定手法 を提案した.今後の課題として,提案手法の車両特定能力 向上のために,照明条件の変化による頑健性の向上と複数 特徴量の使用による拡張を行う. 参考文献 |qo P qo |2 (2) [1] i=1 最も類似度が高い候補画像を特定結果として出力する. 3. 実験 評価実験には,WCVP データセット [2] から作成した データセットを用いた.WCVP データセットは,全方向 [2] [3] から 1 車両を撮影したデータセットで,そこから車両の前 面画像と背面画像のペアを切り出し 17 組の画像ペアを作 成した.前面画像と背面画像のいずれも 90×120pixel とす [4] R. Achanta,, et al.. ”Slic superpixels compared to stateof-the-art superpixel methods.” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 34, no.11, pp. 2274-2282, 2012. Glasner, Daniel, et al. ”Viewpoint-aware object detection and pose estimation.” Proc. IEEE International Conference on Computer Vision, 2011. Opelt, Andreas, et al. ”Generic object recognition with boosting.” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 28, no.3, pp.416-431, 2006. Liu, Ce, et al. ”Sift flow: Dense correspondence across different scenes.” Proc. ECCV, .pp.28-42. 2008. 2
© Copyright 2025 Paperzz