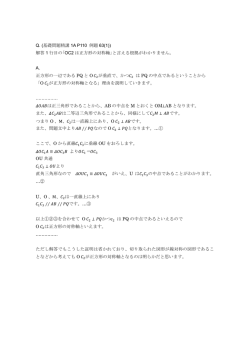
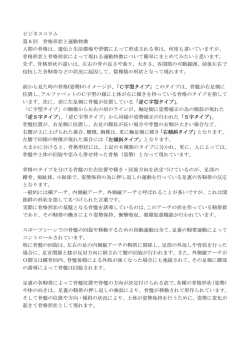
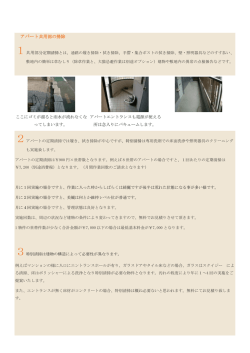
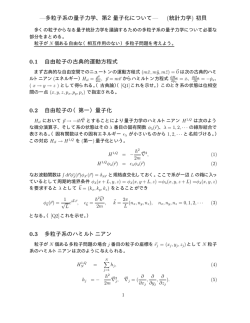
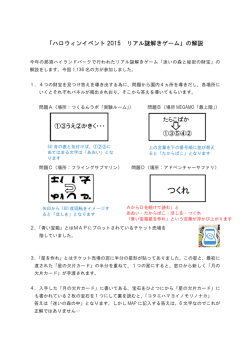
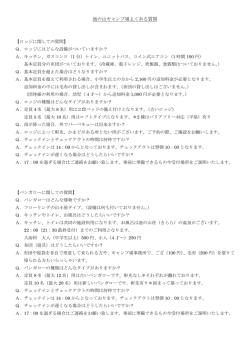
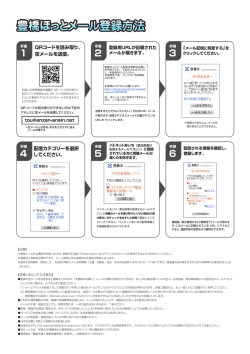
ながれ 27(2008)387 − 396 387 ާ․㓸ި࡙࠾ࠢߥࠕࠗ࠺ࠖࠕ߆ࠄᆎ߹ߞߚ㧘వ┵⎇ⓥᐕߩ߁ߨࠅ! ㆇേ⺰߳ߩ⺃ *੩ㇺᄢቇ Ꮏቇ⎇ⓥ⑼ ᯏ᪾ℂᎿቇኾ㜞╬⎇ⓥ㒮ᵹℂᎿቇ⎇ⓥㇱ㐷 ↰ ṑ̐ 㜟 ⚛ᧉߢන⚐ߥⴣ⓭ㆊ⒟ࠍߣ߽ߥ߁☸ሶ㓸࿅㧔☸ሶ᳇㧕ࠍ㗴᧚ߣߒߡ㧘ㆇേ⺰ᣇ⒟ᑼߦࠃࠆ⽎ߩࡕ࠺࡞ ൻߦߟߡ⸃⺑ߔࠆ㧚☸ሶ᳇ࠍኻ⽎ߣߒߚㆇേ⺰ᣇ⒟ᑼࠍዉߚᓟ㧘ዉߒߚᣇ⒟ᑼ߇ᮡḰ⊛ߥၮᧄ⊛ ᕈ⾰㧔ⴣ⓭ߩਇᄌ㊂㧘ኻ⒓㑐ଥᑼ㧘ᐔⴧ⸃㧘H ቯℂ㧕ࠍᜬߟߎߣࠍ␜ߔ㧚߹ߚ㧘ߎࠇࠄߩᕈ⾰ࠍߟ߆ߞߡ㧘 ☸ሶ᳇ߩᵹജቇᭂ㒢ߦ߅ߌࠆᝄ⥰ࠍ⠨ኤߔࠆ㧚 Invitation to the Kinetic Theory Shigeru TAKATA, Department of Mechanical Engineering and Science, Kyoto University (KEY WORDS): Boltzmann equation, kinetic theory, H theorem, fluid-dynamic limit, Lorentz gas 1 はじめに 1994 年度の竜門賞をいただいてからいつの間にか 14 年もたちました.編集委員会からのお誘いを機会にその 後のことを少し振り返ると,自分の身近で起こった学術 上一番大きな出来事は,我々の分野で「幽霊効果」と呼 ばれるようになった特異な流体力学極限の研究の進展だ と思います.ただ,これについてはすでに本誌で紹介し ています 1) .最近,受賞論文の内容から発展的につなが るテーマに取り組んでいますが,まだこの場で紹介する 段階には至りません.積み上げる石が小さすぎるのか, 積み上げたつもりの石がただ横に並んでいるだけなの か.時間は無慈悲に速くすぎてしまいます.自分自身の 手でよりよく理解したいと思えば思うほど,時間ばかり かかってなかなか前に進みません.せっかく頂いたこの 機会に,どのような話題を提供できるだろうかとしばら く迷っていました. 自分の歩みの遅さはともかく,多少の経験や付き合い で視野が少しずつ広がると,半導体内の電子伝導,粉体 流,交通流,微生物の化学走性,さらには数値流体力学 における格子ボルツマン法など,いろいろな分野で気体 分子運動論の考え方が使われていることに気づきます. これほど多様な分野の話題が同じ枠組みで取り扱われ ているのは,この枠組みが元来もつ自由度の高さと,素 ∗〒 606–8501 京都市左京区吉田本町 takata@aero.mbox.media.kyoto-u.ac.jp † E-mail: 朴で解りやすい概念にあるのだろうと思います.本稿で は,空間にランダムに配置された球体のまわりを流れる 微小粒子群という,イメージをつかみやすい素朴な題材 を対象として,運動論方程式によるモデル化の世界の一 端を紹介しようと思います.運動論が関係する先端的話 題では,多くの場合「流体力学方程式への縮約」の考え 方が理論の中核を担っています.本稿でもこの考え方の 一端を具体的手順を示しながら紹介します.関連の話題 に興味をもつ読者に少しでも益するところがあれば幸 いです. 2 考える模型と方程式の導出 半径 rs の静止球体群がランダムに配置された空間を 球形の粒子群が運動している状況を考えます.非常に大 雑把なアナロジとして,空間をパチンコ台,静止球体 を釘,粒子をパチンコ玉に見立ててパチンコ玉の流れ を思い浮かべると,イメージがつかみ易いでしょうか. 察しの早い読者のためにあらかじめ一言断っておくと, これから導出するモデルは Lorentz 気体 2–5) と呼ばれて いるものと同じです. さて,粒子の半径を rp とすると,粒子と球体の数密 度が大きく違わなければ,粒子同士の衝突と粒子・球体 間の衝突の頻度の比は,大略,衝突断面積の比 π(2rp )2 : π(rs + rp )2 と評価できます.そこで,議論を簡単にす るために,粒子の大きさは球体よりも非常に小さく,粒 子は空間に固定された球体とは衝突するが粒子同士が 運動論への誘い 388 を記述する方程式を導きます.この粒子群集団を以下で 2.2 衝突の影響 さて,これから粒子と球体との衝突を考えることに は “粒子気体” とよびます.衝突に関する上記の仮定に します.衝突が起こると,粒子はそれまでとは異なる速 衝突することはないとして,粒子群の集団的な振舞い ついては付録 1 に補足説明を与えておきます.なお,こ 度を得ます.その様子を図に示すと図 2 のようになりま こでは系に働く外力はないものとします.また,粒子は す.衝突がなければ一本の直線になるはずの代表点の軌 球体と完全弾性衝突をする質点として扱います. 跡が,衝突時刻の位置 X において不連続な 2 本の直線 時刻 t に位置 X ∼ X + dX にあり,速度 ξ ∼ ξ + dξ に変わるのです.注1)ここで大事なことは,衝突による をもつ粒子の個数を f (t, X, ξ)dXdξ と表し,この f を 速度分布関数と呼びます.f は X と ξ が張る相空間内 の粒子の数密度です. 「粒子群の集団的振舞いを記述す る方程式」とは f の振舞いを記述する方程式(運動論 方程式,kinetic equation)のことを指します. 2.1 無衝突過程の記述 まず仮に粒子が球体とも衝突しないとします.すると 各粒子は Newton の運動方程式 dX = ξ, dt 図2 衝突を経験する粒子の代表点の軌跡の分類➀ 〜➃ . この速度の跳びは,大抵の場合,dξ の幅を悠々と超え てしまうということです.したがって衝突の影響によっ dξ =0 dt (1) て,dXdξ にあった粒子の一部は時刻 t に dX dξ に は到達せずに違うところに行ってしまいます.逆に,時 にしたがって運動します.この運動を図に示すと,相 刻 t に dXdξ になかった粒子の一部が,衝突の影響で, 空間内の “X 面に平行な” 直線になります(図 1). 時刻 t = t + dt に dX dξ にやって来ることもありま いま式 (1) にしたがって時刻 t に相空間内の微小領域 す.このようにして式 (2) の左辺 2 項のバランスは崩れ, 右辺はゼロでなくなります.そこで,衝突の結果,時刻 t = t + dt に dX dξ にある粒子の数が時刻 t に dXdξ にある粒子数に比べて増えた量を ∆fcoll と表して, f (t , X , ξ )dX dξ − f (t, X, ξ)dXdξ = ∆fcoll 図1 式 (1) にしたがって相空間内を移動・変形する微小体 (5) のように,式 (2) に衝突の影響を組み込みます. ところで微小時間 dt の間に球体と衝突する粒子は次 積と衝突のない粒子の代表点の軌跡の模式図. の 4 種類に分けられます(図 2 参照) : (X, ξ) ∼ (X + dX, ξ + dξ) にある粒子の代表点が時刻 ➀ 時刻 t において dXdξ にあり,時刻 t (= t + dt) で t に (X , ξ ) ∼ (X + dX , ξ + dξ ) に移ったとすると, dX dξ には到達しないもの; 粒子は生成も消滅もしないので ➁ 時刻 t において dXdξ にないが,時刻 t で dX dξ に到達するもの; f (t , X , ξ )dX dξ − f (t, X, ξ)dXdξ = 0 (2) ➂ 時刻 t において dXdξ にあり,時刻 t でも dX dξ が成り立ちます(粒子数の保存).一方,図からも明ら かなように dXdξ = dX dξ に到達するもの; ➃ 時刻 t において dXdξ になく,時刻 t でも dX dξ にも到達しないもの. (3) です.したがって,とくに t = t + dt とし,式 (1) を 解いて得られる X = X + ξdt,ξ = ξ とあわせて この分類を利用すると ∆fcoll は ∆fcoll = (➁ の粒子数) − (➀ の粒子数) (6) f (t , X , ξ ) に代入し,f (t, X, ξ) のまわりで Taylor 展 と書けますが,右辺の各項はどちらも衝突前後の状態の 開して dt の高次の微小量を無視すると,式 (2) から 両方が制約された粒子の数え上げになるので計算が困 ∂ ∂ f (t, X, ξ) = 0 f (t, X, ξ) + ξi ∂t ∂Xi 難です.そこで上の➂の粒子に注目して式 (6) の右辺を (4) が得られます.これは粒子と球体との衝突がない場合の f の振舞いを記述する輸送方程式(移流方程式)です. (➁ と➂ の総粒子数) − (➀ と➂ の総粒子数) 注1)微小な時間経過を考えるので,一つの粒子はその間に高々1 か衝突しないと仮定します. 回し a田 滋 と書き直して,これを ∆fgain − ∆floss と表します: ∆fcoll = ∆fgain − ∆floss . (7) この書き直しでは ∆fgain 内の➂ の寄与と ∆floss 内の➂ の寄与が相殺され,式 (6) の右辺が回復されていること に注意してください.式 (7) の右辺の各項の意味は次の とおりです. ∆fgain (➁ と➂ の総粒子数):微小時間 dt の間に球体 と衝突し,時刻 t に dX dξ に到達する粒子の総数; 389 ここで β は ξ の方向の単位ベクトルです.式 (8),(9) は Sh ∂F ∂F 1 = C(F ), + βi ∂τ ∂xi κ 1 |β · α|(F∗ − F )dΩ(α), C(F ) = 2π β ∗ = β − 2(β · α)α (10) (11) (12) に簡単化されます.ここで C(F ) の定義式 (11) の右辺で は,慣例にならって F = F (τ, x, β),F∗ = F (τ, x, β ∗ ) ∆floss (➀ と➂ の総粒子数):時刻 t に dXdξ にあり, という省略表記を使っています.誤解を生む恐れがない その後,微小時間 dt の間に球体と衝突する粒子の総数. 限り,今後もこの省略表記を使います.C(F ) あるいは こうして決めた ∆fgain ,∆floss は個別に計算すること ができ,その計算から ∆fcoll の具体形が求められます. この計算の詳細は付録 2 にゆずり,結果だけを示すと ∆fcoll ns rs2 |ξ · α|[f (t, X, ξ ∗ ) − f (t, X, ξ)]dΩ(α) = dXdξdt 2 となります.ここで ξ ∗ = ξ − 2(ξ · α)α,dΩ(α) は α の 方向の立体角素,また積分範囲は α の全方向です.式 (5) は,式 (2) から式 (4) を導いたのと同じ過程をへて ∂ ∂ ∆fcoll f (t, X, ξ) = f (t, X, ξ) + ξi ∂t ∂Xi dXdξdt と書き直せるので,以上をまとめると,結局,f の振舞 いを記述するつぎの運動論方程式が得られました: ∂ ∂ f (t, X, ξ) f (t, X, ξ) + ξi ∂t ∂Xi ns rs2 |ξ · α|[f (t, X, ξ ∗ ) − f (t, X, ξ)]dΩ(α), = 2 ξ ∗ = ξ − 2(ξ · α)α. 式 (10) の右辺を衝突積分と呼びます. 式 (10) に含まれる Sh,κ は,それぞれ Strouhal 数, Knudsen 数と呼ばれるつぎの無次元パラメータです: Sh = L , tref |ξ| κ= 1 = . πrs2 ns L L ここで = (πrs2 ns )−1 は粒子の平均自由行程といわれ る量ですが,その説明は付録 1 にゆずります. ここで後の議論のために単位ベクトルの関数 g のモー メントを表すのに次の記号を導入しておきます: 3 g(β)dΩ(β). g = 4π F のこのようなモーメントは粒子群の速度空間に関す る統計量であって,本稿では慣例にならって巨視量とよ びます.粒子 1 個の質量を m,粒子気体の密度,流速, (8) (9) さて,この段階で,出来上がった方程式を少し観察 しておきましょう.まず式 (9) から |ξ ∗ | = |ξ| ですか ら,速さが違う粒子群の間には相互作用がなく,互いに 独立に振舞うことがわかります.これは粒子同士の衝 応力を m nref ρ,|ξ|v ,m nref |ξ|2 pij と表すと, ρ = F , ρv = βF , pij = (βi − vi )(βj − vj )F (13) となります.誤解の恐れがない限り,以後は無次元量 ρ, v ,pij を単に密度,流速,応力と呼びます. 3 運動論方程式の基本的な性質 突がなく,粒子は球体の表面で鏡面的に反射されると この節では,2 節で導出した運動論方程式をあれこれ した付録 2 の取扱いを反映したもので,直感的にも理 といじって,どんな性質が現れてくるか検討します.運 解できる性質です.このことに注意すると,式 (8) には f (t, X, ξ) = f˜(|ξ|t, X, ξ/|ξ|) という形の相似な解が適 動論の議論に慣れると,この作業は面白く感じられます. 合することがわかります.そこで,これから先は粒子の 速さ |ξ| が揃っている(速さについて “単色”)として話 を進めます. ここで,方程式の無次元化も含めて,式 (8) を一気に 簡単化しておきましょう.代表時間を tref ,代表長を L, 粒子の代表数密度を nref と表して,つぎの無次元量 τ , x,β ,F を導入します: t = tref τ, X = L x, 3 3.1 衝突積分 3.1.1 衝突における不変量 式 (12) をみると,単位ベクトル β を球体に衝突する 前の粒子速度とすると,β ∗ はその粒子の衝突後の速度 であることがわかります.そこで衝突の前後で不変に保 たれる量,つまり,任意の単位ベクトル α に対して ψ(β ∗ ) = ψ(β) ξ = |ξ| β, f (t, X, ξ) = (nref |ξ| ) F (τ, x, β). (14) をみたす量 ψ を衝突の不変量とよびます.式 (12) で定 まる 3 つの単位ベクトル β ∗ ,β ,α は同一平面内にあ 運動論への誘い 390 ところで,C(g) = 0 ⇒ gC(g) = 0 ですから,性質 5 によって g は衝突の不変量です.したがって性質 2 を もっと強い次の主張に換えることができます: 性質 2 . C(g) = 0 ⇔ g は定数(衝突の不変量). つまり,正味の衝突の影響がなければ粒子の分布は “速 度”β について等方的であり,逆に粒子の分布が等方的 図3 単位ベクトル β ,α,β ∗ の位置関係. り,その位置関係は図 3 に示すとおりです.β を固定し て α をあらゆる方向にとると,それに応じて β ∗ はあ らゆる方向を(2 重に)指し尽しますから,式 (14) は ψ が任意の単位ベクトルに対して同じ値を与える,つまり 定数であることを意味します:注2) 性質 1. 衝突の不変量は(粒子速度に関して)定数に 限られる. また,式 (11) から次のことがわかります: 性質 2. ψ が衝突の不変量ならば C(ψ) = 0. 3.1.2 対称関係式とそれから導かれる性質 単位ベクトルの任意の関数 g ,h に対して次の積分 3 g(β)C(h)dΩ(β) (15) gC(h) = 4π を考えます.このとき次の等式が成り立ちます: 3 |β · α|[g(β ∗ ) − g(β)] gC(h) = − (4π)2 × [h(β ∗ ) − h(β)]dΩ(α)dΩ(β). (16) ならば衝突の影響は正味ないということです. 3.2 保存方程式と運動量バランス 粒子が球体によって鏡面的に反射されるという描像か ら直感的に明らかですが,いま考えている粒子気体系で は質量が保存されるはずです[注2)参照].このこと は 3.1 節の性質 1 に集約されているのですが,ここでは 巨視量を用いた保存式の表現を導きます. まず予備事項として,3.1 節の性質 1–3 から C(g) = 1C(g) = gC(1) = 0 (18) であることに注意します.式 (10) を(3/4π を乗じて) β について積分すると,右辺の寄与はないので Sh ∂ ∂ βi F = 0, F + ∂τ ∂xi つまり Sh ∂ρ ∂ρvi =0 + ∂τ ∂xi (19) という,流体力学でなじみの連続の式が得られます. 一方,球体との衝突で粒子の運動量は変化するので, 粒子気体の運動量が保存されることはないはずです.こ ここで積分の範囲は単位ベクトル α,β の全方向です. のことは,式 (10) に (3/4π)βj を乗じて β の全方向につ 式 (16) は非常に大切な関係式なので証明を付録 3 に示 いて積分すると,右辺の衝突積分が運動量の生成項とし します.式 (16) から直ちに次のことがわかります. gC(h) = hC(g). 性質 4.(非正値性) gC(g) ≤ 0. 性質 3.(対称性) 性質 4 は gC(g) が式 (16) の特別な場合として 3 |β · α|(g∗ − g)2 dΩ(α)dΩ(β) (17) gC(g) = − (4π)2 と書けることからわかります.もちろん性質 4 で等号が て残るという形で反映されます: Sh βi βj F は式 (13) に注意すると βi βj F = (βi − vi )(βj − vj )F + vi (βj − vj )F + βi F vj = pij + ρvi vj と書き直せるので,式 (20) は ならば式 (17) の右辺はゼロになりますから,結局 性質 5. gC(g) = 0 ⇔ g は定数(衝突の不変量). となります. (20) 性 質 3 か ら βj C(F ) は F C(βj ) に 等 し く,ま た 成立するのは右辺の被積分関数がゼロ,つまり g が衝 突の不変量の場合に限られます.逆に g が衝突の不変量 ∂ ∂ 1 βi βj F = βj C(F ). βj F + ∂τ ∂xi κ Sh ∂ρvj 1 ∂ (ρvi vj + pij ) = F C(βj ) + ∂τ ∂xi κ (21) となります.この式は後で再び議論します. 注2)粒子が球体表面で鏡面的に反射されるので,直感的には粒子の質 量とエネルギーが保たれると理解できます.ここでは “単色” の粒子 速度を考えているので,エネルギーの保存が縮退して,質量に対応す る定数だけが出てきています. 3.3 平衡解と平衡分布 衝突積分を構成する 2 つの項が釣り合って C(F ) = 0 となる分布を(局所)平衡分布とよんで Feq で表しま a田 滋 391 す.性質 2 によって平衡分布は β に関する定数ですが, で定義される H 関数の流れ速度です.式 (24) により 式 (13) から,この定数は密度 ρ そのものです: (ii) 境界 ∂D において jiH ni = 0 ならば D H(τ, x)dx は Feq = ρ = Feq . (22) 決して増大しない. ということがわかります.この場合も定常状態に達す またこの分布は流速ゼロ(v = 0),非対角成分をもた るとまず D F C(F )dx = 0 から F C(F ) = 0 が要請 1 ない等方的な応力(pij = 3 ρδij )を与えます.平衡分 され,これから F が平衡分布であることがわかります. 布は一般に時間 τ と位置 x の関数です. ところがこの平衡分布は同時に式 (10) の解でなければ 平衡分布でとくに式 (10) を満たすものを平衡解とよ ならないので,平衡解,つまり空間的にも状態が一様で びます.式 (22) の形を式 (10) に代入すれば あるということになります.こうして,系はやはり時間 ∂ρ 1 ∂ρ とともに平衡解へ近づくことがわかります. =0 + βi ∂τ 3 ∂xi 以上の主張 (i),(ii) を H 定理とよびます.注3) となりますから,この式およびこの式に βj を乗じたも のを β について積分すると,ρ が時間 τ と位置 x によ 3.5 衝突積分の性質と運動量の式の再考 らない定数ということがわかります.つまり式 (10) の 3.2 節で運動量の式 (21) を導きました: 平衡解は τ ,x,β によらない定数です. Sh 3.4 H 定理 式 (10) の両辺に (3/4π)F を乗じて β で積分すると ∂ 1 ∂ 1 1 Sh F 2 + βi F 2 = F C(F ) ≤ 0 ∂τ 2 ∂xi 2 κ (23) ∂ρvj 1 ∂ (ρvi vj + pij ) = F C(βj ). + ∂τ ∂xi κ 右辺は衝突積分による運動量の生成項です.これは粒子 と球体の衝突によるものですから,直感的には粒子速度 に比例するダンパとして表されてもよさそうです.そこ で C(βi ) を調べてみると,定義式 (11),(12) から,果た が得られます.最後の不等式は性質 4 によるものです. して次のように簡単に計算することができます: 左辺の第 2 項は発散形ですから,大雑把に言えば,式 1 |β · α|(β∗i − βi )dΩ(α) C(βi ) = 1 2 (23) は外部と切り離された系では 2 F が時間的に単 2π 1 調に減少するということ,つまり系の振舞いに方向性が |β · α|(β · α)αi dΩ(α) =− π あることを示しています.慣例にならい,今後は,この 1 量を H と書いて H 関数と呼びます: |β · α|(β · α)2 βi dΩ(α) =− π 1 3 F 2 dΩ(β)(≥ 0). H(τ, x) = F 2 = = − βi . (25) 2 8π 上で述べたことをもう少し正確に述べます.まず F 成分とそれに垂直なベクトル α⊥ とに分解して[αi = が空間一様な場合を考えます.このとき式 (23) は Sh (β · α)βi + α⊥i ],α⊥ を含む項を被積分関数の奇関数 dH(τ ) 1 = F C(F ) ≤ 0 dτ κ 性によって落としました.この計算の結果から運動量の 生成項は となりますから, (i) ここで 2 行目から 3 行目の変形では,α を β 方向の 状態が空間一様ならば H は決して増大しない. ということがわかります.また定常状態に達すると F C(F ) = 0 になりますから,系は時間とともに平衡 解へ近づくことがわかります.つぎに状態が空間的に一 様でない場合を考えます.適当な x の領域 D で式 (23) を積分し Gauss の発散定理を用いると d Sh Hdx − H jiH ni dS dτ D ∂D 1 F C(F )dx ≤ 0. = κ D 線ベクトル,j は 1 1 jiH = βi F 2 / F 2 2 2 となりますから,運動量バランスの式 (21) は Sh ∂ρvj 1 ∂ (ρvi vj + pij ) = − ρvj + ∂τ ∂xi κ 注3)式 (26) (10) の両辺に (3/4π)(1 + ln F ) を乗じて β で積分すると Sh ∂ ∂ 1 F ln F + βi F ln F = C(F ) ln F ∂τ ∂xi κ を得ますが,この右辺は非正値で,F が平衡分布のときに限ってゼロ (24) ここで n は D の内部を向いた D の境界 ∂D の単位法 H F C(βi ) = −βi F = −ρvi になります.これは (F∗ − F ) ln(F∗ /F ) ≥ 0(等号成立は F∗ = F のときに限る)であるためです.したがって F ln F をもとに H 定 理を構成することもできます.むしろその構成のほうが熱力学や(平 衡)熱統計力学のエントロピー,Shannon のエントロピーとの対応が 素直にとれるので,標準的といえるかもしれません.あとの議論に差 し支えないので,ここでは形が単純なものを選びました. 運動論への誘い 392 となります.この方程式の解を κ のべき展開 という,予想したとおりの式になりました. 連続の式 (19) と運動量の式 (26) がそろうと,これら の 2 式だけで粒子気体の振舞いが調べられると早合点 するかもしれませんが,そうはいきません.応力 pij は 流速や密度とは独立で,連続の式と運動量の式は閉じた F = F (0) + F (1) κ + · · · によって求めます.この展開形を式 (27) に代入すると, 展開の最低次は 系を構成していないのです.これが流体力学の方程式系 との違いです.そもそも,連続の式 (19) と運動量の式 ∂τ F (0) = C(F (0) ) (26) はもとの運動論方程式 (10) の適当な射影をとった ものにすぎません.“影” にうつった情報だけから “影” を満たすことがわかります.この解を解析的に求められ の次の動きを完全に把握できると考えるのはどうも虫 合の式 (10) と同じなので,3.5 節の最後の議論が使えて がよすぎるわけです. しかし状態が空間一様な場合には,連続の式 (19) と 運動量の式 (26) だけから,粒子気体の振舞いについて 式 (19) から dρ/dτ = 0.すなわち密度 ρ は時間に よらない定数である. 2. F (0) = Finitial , βi F (0) = βi Finitial e−τ , さらに空間一様の場合の H 定理の導出過程をなぞって 次の重要な情報が得られます. 1. るかどうかわかりませんが,方程式の形は空間一様の場 Sh d(ρvj )/dτ = −(1/κ)ρvj .すなわち vj (τ ) = vj (0) exp(−τ /κ Sh).球体ダンパの作用によって粒子気 体の流速は指数関数的にゼロに減衰する. ∂ 1 (0) 2 (F ) = F (0) C(F (0) ) ≤ 0 ∂τ 2 となります.したがって τ → ∞ で定常状態に達すると, F (0) は平衡分布に達します: F (0) → F (0) = Finitial as τ → ∞. 4 運動論方程式から流体力学方程式へ この平衡分布は初期状態の粒子気体の密度分布に応じ 3 節で運動論方程式 (10) の基本的な性質を大体見極め ました.そこで運動論方程式から流体力学方程式への縮 て x に依存します. 約という,少し踏み込んだ内容を最後に取り上げます. 4.2 Sh = O(1) の場合 4.1 節の時間スケールで十分に時間がたつと,F は平 式 (10) には 2 つのパラメータ Sh と κ が含まれていま すが,Knudsen 数 κ が小さいとき(κ 1)の粒子気体 衡分布に近づくので C(F ) の値は小さくなり,式 (10) の の振舞いを調べるのです.これは考えている空間スケー 右辺の大きさは O(1) に収まるようになります.したがっ ルで粒子と球体との衝突が頻繁に起こる状況です.パラ て,左右両辺の釣り合いから,F の時間変化も O(1) に メータはもうひとつある(Strouhal 数 Sh)ので,その 収まらないといけません.そこで Sh = 1 としてこの先 大小に応じて粒子気体の振舞いは大分違ってきます ここでは議論を初期値問題に限定します. 6, 7) . の振舞いを調べます.再び Sh の定義に戻って考えると, これは代表時間を tref = L/|ξ|,つまり粒子が代表長さ 4.1 ごく初期の振舞い:Sh = O(1/κ) 初期時刻に F の適当な分布が与えられているとしま す[F (τ = 0, x, β) = Finitial (x, β)].Finitial (≥ 0) の 選択にとくに制限はありません.F が平衡分布でなけ れば衝突積分 C(F ) は O(1) の量ですから,式 (10) の 左辺と右辺が釣り合うには Sh∂F/∂τ = O(1/κ) でな ければなりません[空間微分項は O(1) です].そこで Sh = 1/κ となる時間スケールを考えます.Sh は定義に よって Sh = L/tref |ξ| ですから,これは代表時間 tref を tref = κL/|ξ| = /|ξ| に選んだことにあたります.これ は粒子の平均自由時間です. 新しいスケールの下で式 (10) を改めて書くと ∂F ∂F 1 = C(F ) + βi ∂τ ∂xi κ (28) となります.この方程式の解を再び κ のべき展開 F = F (0) + F (1) κ + · · · によって求めましょう.4.1 節と同じ記号 τ や F を使っ て書いていますが,そこのものとは全く別物ですので 注意してください.4.1 節の時刻無限大(τ → ∞)は 新しい時間の尺度では(κ → 0 で)初期時刻 τ = 0 で そこで式 (10) を改めて書くと 1 ∂F ∂F 1 = C(F ) + βi κ ∂τ ∂xi κ を進むのに要する時間に選んだということです. す.したがって,この節の議論では,初期状態は 4.1 節 (27) の Finitial を使って F (τ = 0, x, β) = Finitial (x) a田 滋 で与えられます.注4) でなければなりません.注6) F の展開形を式 (28) に代入すると, C(F (0) ) = 0, 結局,粒子気体の初期状態が式 (33) の第 1 式を満た (29) ∂F (0) ∂F (0) C(F ) = , + βi ∂τ ∂xi ∂F (1) ∂F (1) , + βi C(F (2) ) = ∂τ ∂xi (1) そうでなければ,時間に比例して解が成長するというこ とになります. (31) 4.3 Sh = O(κ) の場合 粒子気体の初期状態が式 (33) を満たさないとき,時 間とともに解が成長すると述べました.しかし,これは という,最低次から順次解いていける一連の方程式が得 られます.式 (29) から F (0) は平衡分布でなければなり ません.このことは初期条件と矛盾していません.F (0) は平衡分布なので F (0) = F (0) ,βi F (0) = 0 です. つぎに式 (30) を解いて F (1) を得ることを考えます. このとき,左辺の衝突積分は式 (18) の性質をもつので, 式 (30) がこれに矛盾すると解はありえません.そこで 矛盾しない条件を調べると注5) 時間の経過とともに解が発散するということですから到 底満足できる描像ではありません.このとき本当はいっ たい何が起こるのでしょう? それを観るためにもっと長 い尺度の時間変化を考えます.注7)そこで Sh = κ とし ます.Sh の定義に再び戻って考えると,これは代表時 間 tref を tref = (L/κ)/|ξ| に選んだことにあたります. 粒子が直線距離で L だけ進む間にたどるジグザクの軌 跡の総距離は大略 L/κ なので,注8)新しい代表時間は それに要する時間ということができます. ∂ 0= F (0) ∂τ 新しいスケールで式 (10) を書くと,こんどは を得ます.ここで βi F (0) = 0 を考慮しました.つま りF すならば F (0) = Finitial の状態が持続するけれども, (30) ··· (0) 393 = Finitial であり,いまの時間尺度では何も起 こらないことを意味します.さて,この条件のもとで, ∂ 式 (30) は C(F (1) ) = βi ∂x Finitial になります.そこで i κ ∂F ∂F 1 = C(F ) + βi ∂τ ∂xi κ になります.初期条件は F (τ = 0, x, β) = Finitial (x) です[注4)参照].この方程式の解を再び κ のべき展開 F = F (0) + F (1) κ + · · · 式 (25) を利用してこれを解けば(付録 4) F (1) = F (1) − βi ∂ Finitial ∂xi (32) で求めます.同じ記号を使いますが,4.1 節,4.2 節のも のと混同しないように注意してください. ということがわかります. さらに先の F (2) は式 (31) を解いて求められます.し かしそのためには F (1) を得た場合と同様で,式 (31) が 式 (18) と矛盾していてはいけません.これが矛盾しな い条件は[注5)参照] 0= ∂F (1) ∂βi F (1) + ∂τ ∂xi F の展開形を式 (34) に代入すると, C(F (0) ) = 0, (35) (0) ∂F , ∂xi ∂F (1) ∂F (0) , C(F (2) ) = + βi ∂τ ∂xi C(F (1) ) =βi (36) (37) ··· ですが,すでに得た F (1) の具体形を代入して整理する が得られます.式 (35) から F (0) は平衡分布で,初期条件 と,これは 0= がこれに矛盾しないこと,F (0) = F (0) ,βi F (0) = 0 ∂ 1 ∂2 Finitial F (1) − ∂τ 3 ∂x2i ら,1 次の解 F (1) が時間とともに発散しないためには ∂2 Finitial = 0, ∂x2i ∂ F (1) = 0 ∂τ (33) O(κ) の誤差を含みます.高次の影響まできちんと議論す る場合は F (0) (τ = 0, x, β) = Finitial (x) と書くべきです. 注5)具体的には式 F (2) を具体的に出す手前で止めています. は時間によりませんでした.このことから,空間 注6)議論に不要なので と書けます.右辺の第 2 項は時間に関する定数項ですか 注4)これは (34) (30) の両辺を β で積分するだけです.なお,式 注7)4.2 節で F (0) 微分の項 βi ∂F/∂xi と衝突積分の項 (1/κ)C(F ) がほぼ釣り合い,時 間微分の項が κ の高次の量になるという構図が浮かびます.これが新 しい時間尺度を考える 1 つの動機です.もっと直感的に表現すると, 4.2 節の時間尺度では定常に見えて捕捉できなかった程度の,ゆっく りとした現象の可能性を検討するということです. 注8)衝突による粒子の散乱に方向性がなければ,N 粒子が進む直線距離は √ c 回の衝突を経て Nc と見積れます.したがって粒子が直線 (29),(30) 等の展開後の式を β で積分することは,保存式 (19) を展 距離 L を進む間に経験する衝突数 NL は NL = (L/)2 ,この間に 開したものを κ のべき毎にみるのと同じことです. 粒子が移動する総距離は NL = L(L/) = L/κ となります. 運動論への誘い 394 であることは 4.2 節と変わりません.式 (36),式 (37) は (0) 与えられた初期分布から,まず平均自由時間の尺度で平 = 衡分布への緩和が起こる.この緩和過程では空間の各位 F を考慮すると,式 (36) は式 (18) と矛盾がなく簡 単に解けて(付録 4 参照) 置での粒子密度は一定に保たれる.そして平衡分布へ緩 4.2 節の対応するものと時間微分の項が違います.F (0) F (1) = F (1) − βi た尺度で拡散が起こる. ∂ F (0) ∂xi 4 節の議論は流体力学極限とよばれるトピックの一例 を得ます.そこでこれを式 (37) に代入すると ∂F (1) ∂ 2 F (1) ∂F (0) C(F (2) ) = − βi βj + βi ∂τ ∂xi ∂xi ∂xj になりますが,これが式 (18) と矛盾しない条件を調べ て整理すると[注5)参照] 0= I.C. 2 (0) 1∂ ρ , 3 ∂x2i (0) ρ た,本稿では積極的な意味を持たなかった 4.2 節の時間 域は “Euler 領域” あるいは “非粘性領域” とよばれます. 5 おわりに モデル化の方法を具体的に紹介しました.読み物として 結局,初期条件とあわせて,粒子気体の振舞いは = 域は “拡散領域” あるいは “粘性領域” とよばれます.ま を流れる微小粒子群を題材として,運動論方程式による にそって粒子気体が振舞うときにみられるのです. ∂ρ ∂τ で,4.1 節の初期緩和時間域は “初期層”,4.3 節の時間 本稿では,空間にランダムに配置された球体のまわり ∂F (0) 1 ∂ 2 F (0) − ∂τ 3 ∂x2i が得られます.つまり,本節で想定した状況はこの条件 (0) 和した後,平均自由時間の κ−2 倍程度のゆっくりとし の取りつきの良さを考慮して,煩雑な部分の詳細は本文 から除きましたが,付録として与えて議論や導出の過程 での跳びがほとんどないように努めたつもりです. 本稿で提供した題材は,じつは出張先での気楽な遊び に端を発しています.希薄気体に対する Boltzmann 方 (τ = 0, x) = ρinitial (x) 程式からややこしいところを出来るだけ排除して,大 学院生の入門用の題材になり得るような,手頃で簡単 で記述されることがわかりました.ここで ρ(0) = F (0) , な運動論方程式を作ってみたいというのが元々の動機で ρinitial = Finitial と表しています.つまり平衡分布へ した.出来上がったモデルは,結局,Lorentz 気体 2–5) 移行した後,粒子気体は拡散するわけです.注9)注10) と呼ばれているものに他なりません.Lorentz 気体とは, 4.4 まとめ 4 節の内容をまとめると次の描像が得られました: Lorentz が 1905 年に提案した運動論モデルで,元々は Drude による金属の電気伝導論 2, 8) に理論的裏付けを与 えるために導かれたのだそうです.気軽にはじめた遊び 注9)都合の悪い 4.2 節の結果を無視して 4.1 節と無理矢理つないでい るわけではありません.4.2 節の時間を τ1 と書くと,τ = κτ1 です から F (τ, x, β) = F (0, x, β) + κτ1 ∂τ F (0, x, β) + · · · (τ 1)と なり,ごく初期の時間帯では O(κ) において 4.2 節の時間尺度で τ1 に比例する項が現れます.導かれた拡散方程式の形から,この項の成 長率 ∂τ F (0, x, β) は 1 ∆Finitial 3 であり,4.2 節の解が本節の解 で表されていることがわかります. から “由緒正しい” モデルに行き着きました.少しの寄 り道が良い素材との出会いにつながり,筆者にとって楽 しい経験になりました. 謝辞:大阪大学 矢野猛教授には,草稿を読んだ上で,お もに対象読者とそれに応じた原稿構成について助言を (18),つまり連続の式がもっぱら 頂きました.京都大学 青木一生教授からいただいた指 に考慮されるのは,これが線形積分方程式の可解条件にあたるからで 摘によって,4.2 節の位置づけを適正にすることができ す.希薄気体に対する Boltzmann 方程式とは違い,本稿の模型では ました.京都大学 稲室隆二教授からも助言をいただき, 運動量の式 (26) は可解条件ではなく,方程式を解く議論の過程に入 4 節の補足説明を充実することができました. 注10)拡散方程式に至る議論で,条件 り込む余地はありません.とはいえ,流体屋としては,運動量の式が どんな意味を持つのか気になるところです.そこで Sh = κ とした運 動量の式 (26) に F = F (0) + F (1) κ + · · · を代入してみます.す ∂ρ(0) ∂xj 1 (0) (0) v (1) = ρ δ , ρ ij j 3 (1) ると最低次の O(κ0 ) において ρ(0) vj (0) ここで pij = βi βj F (0) = = − 13 が得られます. 付録 1 運動論方程式の誘導についての補足事項 この付録では,運動論方程式 (8) の誘導において前提とし た物理的状況の設定を整理しておきます. βj F (1) を用 粒子の速度分布関数や球体の数密度 ns を導入したので,微 いました.Sh = κ とした連続の式 (19) は最低次の O(κ) において 小体積 dX 内に粒子や球体は無数になければなりません(粒 ∂ρ(0) ∂τ 子の数密度を np と書くと np dX 1,ns dX 1).これ + (1) ∂ ρ(0) vi ∂xi = 0 を与えますから,これに上の表現を代入す れば 4.3 節の拡散方程式が回復されます.こうして運動量の式は密度 勾配によって誘起される質量流速の表現を与え,これが構成式となっ て連続の式を拡散方程式として閉じさせるという構図が得られます. は話の大前提です. まず,2 節の冒頭で触れた,粒子間衝突が無視できることか ら説明します.粒子が進む方向の単位長さを考えると,その進 a田 滋 395 路には大略 π(rp + rs )2 ns 個の球体と π(2rp )2 np 個の粒子とが と表すと,微小時間 dt の間に微小表面 rs2 dΩ(α) に衝突するこ あります.これらの数はそのまま粒子の衝突機会を与えます. のような粒子は,体積 |ξ · α|dt × rs2 dΩ(α) の柱状領域の中に いま,粒子は球体よりも非常に小さい(rp rs )ので,粒子 ありますが (図 4),その数は rs2 |ξ · α|dΩ(α)dt × f (t, X, ξ)dξ と球体の数密度が同程度(np ∼ ns )であれば,粒子・球体間 の衝突機会は粒子間の衝突機会のおおよそ (rs /rp )2 倍となり, 粒子間の衝突を(粒子・球体間の衝突に比べて)無視するこ とができます.注11)また,この試算から粒子が球体に衝突する ことなく進む平均的な距離は [π(rp + rs )2 ns ]−1 ∼ (πrs2 ns )−1 となります.これが 2.2 節で導入した平均自由行程 です. さて,球体が関わる微視的な長さには,球体の半径 rs ,球 −1/3 体間の平均距離 ds = ns ,平均自由行程 = (πrs2 ns )−1 微小時間 dt 間に面積要素 rs2 dΩ(α) で球体に衝突する の 3 つがあります.これらの長さの比は rs /ds = (ns rs3 )1/3 , 図4 ds / = (ns rs3 )2/3 のように,球体の占有体積率 (ns rs3 ) だけで 粒子がある柱状領域. 表されます.筆者のような気体屋が想定するのは,この体積 になります.注13)したがって,ξ · α < 0 を満たす,すべての 占有率が非常に小さい場合です: ns rs3 方向の α についてこの数を積算すると,微小時間 dt の間に 1. (38) 1 つの球体に衝突する速度 ξ ∼ ξ + dξ をもつ粒子の総数が得 られます: 式 (38) のもとでは,3 つの長さは rs ds のように階 rs2 注12) 層化されます. また,球体と衝突している粒子の割合は np × ns rs3 dX/np dX = ns rs3 1 ですから,粒子はほとんど 衝突せず自由に運動しています.式 (38) に対応する数学的極 限(ns → ∞,rs → 0,ns rs3 → 0)で ns rs2(平均自由行程の 逆数)の値にとくに制限をつけないと,対応する Knudsen 数 κ は 0 < κ < ∞ の範囲の任意の値を取りえます.運動論方程 式 (10) はこのような状況下での粒子気体の振舞いを記述する と考えられます(Grad 極限)4, 9) . 本稿では,衝突の影響 ∆fcoll を具体的に計算できるように, ξ·α<0 |ξ · α|f (t, X, ξ)dΩ(α) dξdt. 一様と仮定した球体の数密度を ns と表すと,微小体積 dX 内 に球体は ns dX 個あるので,∆floss は結局 ∆floss |ξ · α|f (t, X, ξ)dΩ(α) =ns rs2 dXdξdt α·ξ<0 ns rs2 = |ξ · α|f (t, X, ξ)dΩ(α) 2 (39) となります.最後の積分の積分範囲は α の全方向です. 対象の模型を思い切って簡単にしました.この部分が複雑だっ たり,“衝突” のメカニズム自体が不明の場合,ここを(ある 意味で気楽に)大胆に仮定してしまうことがよく行われます. 付録 2.2 ∆fgain の部分 2 節の導入部で仮定したように,粒子は球体と完全弾性衝 この許容性が運動論の適用範囲の広さにつながっているので 突する質点として扱います.球体は空間に固定されているの すが,十分よく練った ansatz を導入しないと,いかにも不自 で,粒子は球体表面で鏡面的に反射されます.つまり,球体 然な結果を導く,できの悪い方程式しか得られません.当た の中心から α の方向で表面に衝突する粒子の速度が ζ ∗ から り前のことですが,ここが一番難しいところです. ζ に変化したとすると 付録 2 ζ = ζ ∗ − 2(ζ ∗ · α)α 衝突の計算の詳細 付録 1 に与えた補足事項を念頭において,衝突積分の誘導 が成り立ちます.これを念頭において ∆fgain を調べましょう. 微小体積 dX 内の 1 つの球体に注目します.時刻 t から の詳細をこの付録で与えます. 付録 2.1 (40) みて,過去 dt 時間の間にこの球体に表面 rs2 dΩ(α) で衝突す ∆floss の部分 粒子を質点として扱っているので,粒子と球体との衝突は, 粒子が球体の表面(中心から半径 rs の位置)に来たときに起 こります.まず考えやすい ∆floss から扱います. る速度 ζ ∗ ∼ ζ ∗ + dζ ∗ の粒子の総数は rs2 ζ ∗ ·α<0 |ζ ∗ · α|f (t , X , ζ ∗ )dΩ(α) dζ ∗ dt 微小体積 dX 内の 1 つの球体に注目します.この球体の中心 からみて単位ベクトル α の方向の表面に衝突する衝突する速 度 ξ ∼ ξ + dξ の粒子を考えます.α 方向の立体角素を dΩ(α) 注11)粒子間衝突が無視できるために np ∼ ns は必須ではありません. )2 注13)この柱状領域の大きさは f を定義するときに考えた微小領域 dX よりもずっと小さいものです.このような計算では dX 内で f は統 計的に一様であると仮定しています.本稿で導く運動論方程式には ns /np (rp /rs が満たされていれば十分です. 注12)このように球体間の距離よりもずっと長い距離を衝突せずに進め 3.4 節の H 定理が示す時間の方向性がありますが,これは球体の配置 るのは,一言でいえば,標的の球体が小さいためです. 処理とから生じたと考えています. の詳細に無頓着な統計情報 ns をすぐ後で使うことと,ここでの統計 運動論への誘い 396 ですが,この中には衝突後の速度 ζ がどんな場合も含まれて これを記号 β で表すと います.いま注目するのは,このうち,衝突後の速度が ξ ∼ ξ + dξ の範囲にある粒子の数です.それは rs2 |ζ ∗ · α|f (t , X , ζ ∗ )dΩ(α)dζ ∗ dt (41) 1 2π g(β − 2(β · α)α)|β · α| × [h(β) − h(β − 2(β · α)α)]dΩ(α)dΩ(β) ζ ∗ ·α<0, ζ ∗ ∈D で与えられます.ここで D は衝突後の速度 ζ が ξ ∼ ξ + dξ になるような ζ ∗ の領域を表します.ζ は α の反転に対して 不変なので,領域 D も α を反転しても変わりません.この ことを使うと式 (41) は 2 rs 2 ζ ∗ ∈D |ζ ∗ · α|f (t , X , ζ ∗ )dΩ(α)dζ ∗ dt 1 2π g∗ |β · α| (h − h∗ ) dΩ(α) dΩ(β) (45) 最後に式 (44) と式 (45) の和をとり 2 で割れば式 (16) が得 (42) 変換します.この変換のヤコビアンは 1 であり,ζ ∗ ·α = −ζ ·α の関係に注意すると,式 (42) は られます. 付録 4 まず ∂ C(F (1) ) = βi ∂x Finitial の解き方 i ∂ Finitial ∂xi が β の定数であることに注意します.C は線形なので,式 (25) から ζ∈(ξ ,ξ +dξ ) I(g, h) = という新しい表現が得られました. に書き換えられます.ここで積分変数を (α, ζ ∗ ) から (α, ζ) へ rs2 2 となります.β − 2(β · α)α は定義により β ∗ ですから,結局 |ζ · α| × f (t , X , ζ − 2(ζ · α)α)dΩ(α)dζ dt r2 |ξ · α|f (t , X , ξ − 2(ξ · α)α)dΩ(α) dξ dt = s 2 C(F (1) + βi ∂ ∂ Finitial ) = C(F (1) ) + C(βi ) Finitial ∂xi ∂xi ∂ ∂ Finitial − βi Finitial = 0 = βi ∂xi ∂xi を 得 ま す.し た がって 3.1.2 節 の 性 質 2 か ら F (1) + と変形できます.最後の表現を得るのに ζ の積分を実行しま ∂ Finitial は β に関する定数です.この定数は F (1) に βi ∂x i した.微小体積 dX に球体は ns dX 個あるので,∆fgain は 定まります: 結局 ∆fgain = ns rs2 2 F (1) + βi |ξ · α| × f (t , X , ξ − 2(ξ · α)α)dΩ(α) dX dξ dt と求められます.さらに dt の高次の誤差を無視すれば,これ は結局 ∆fgain ns rs2 = dXdξdt 2 |ξ · α|f (t, X, ξ∗ )dΩ(α) (43) 対称関係式 (16) の証明 式 (15) の定義から 1 I(g, h) = g |β · α| (h∗ − h) dΩ(α) dΩ(β) 2π 引用文献 1) 㜟田 滋:流体力学極限についての分子気体力学に よる最近の研究,ながれ 19 (2000) 226–236;正誤 表:ながれ 20 (2001) 255. 2) Pottier, N.: Physique statistique hors d’équilibre (EDP Press, 1995) Sec. 10.5. 4) Gallavotti, G.: Statistical mechanics (Springer, 1999) (44) です.積分変数を (β, α) から (β ∗ , α) の組へ変換します.β ∗ の定義式 β ∗ = β − 2(β · α)α は,β ∗ · α = −β · α に注意す ると β = β ∗ − 2(β ∗ · α)α と書き直せるので,この変換のヤ コビアンの絶対値は 1 です.したがって式 (44) の右辺は 1 2π これが式 (32) です. Sciences/CNRS Éditions, 2007) Complément 5.A. 3) Chapman, S., Cowling, T. G.: The mathematical theory of non-uniform gases (Cambridge University になります.ここで ξ∗ = ξ − 2(ξ · α)α と表しました. 付録 3 ∂ Finitial = F (1) . ∂xi g(β ∗ − 2(β ∗ · α)α)|β ∗ · α| × [h(β ∗ ) − h(β ∗ − 2(β ∗ · α)α)]dΩ(α)dΩ(β ∗ ) と書き直せます.この表現では β ∗ はただの積分変数だから, Appendix 1.A2. 5) 鈴木増雄 他 訳:統計物理学ハンドブック(朝倉書 店,2007)8.2 節. 6) Sone, Y.: Molecular gas dynamics (Birkhäuser, 2007) Sec. 3.7. 7) Nicolis, G.: Introduction to nonlinear science (Cambridge University Press, 1995) Secs. 5.1–5.3. 8) Singleton, J.: Band theory and electronic properties of solids (Oxford University Press, 2001) Chap. 1. 9) 曾根 良夫,青木 一生: 分子気体力学 (朝倉書店, 1994) 1.1 節.
© Copyright 2024 Paperzz