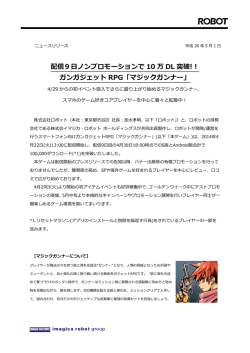
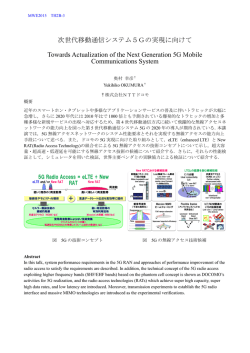
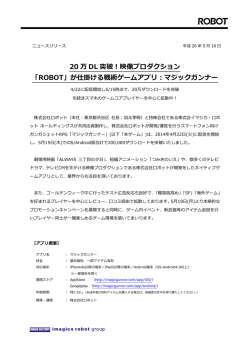
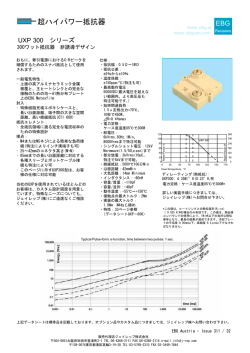
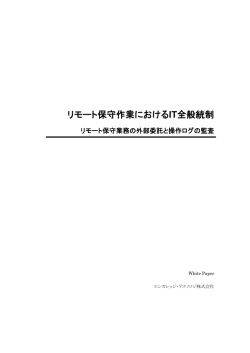
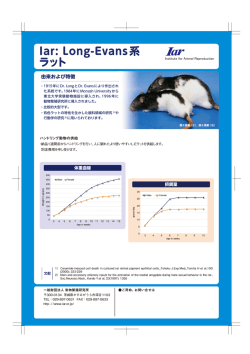
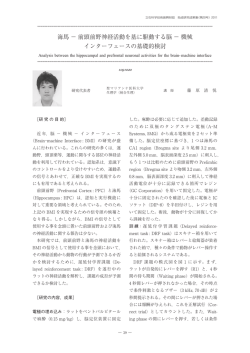
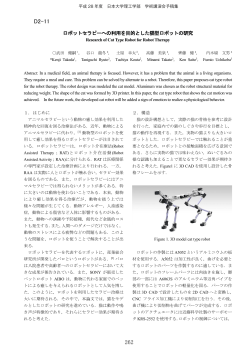
帝京科学大学紀要 Vol.4(2008) pp.41-52 エンタテインメントロボットを用いたロボット介在リハビリテーションの試み 鉃井俊宏 1 大久保英一 1 加藤範子 2 佐藤真一 3 木村龍平 1 永沼充 1✉ 1 帝京科学大学生命環境学部 2 所沢ロイヤル病院リハビリテーション科 3 甲府市立甲府病院リハビリテーション科 (平成 19 年 12 月 20 日受理) Preliminary Studies of Robot Assisted Rehabilitation Using Commercially Available Entertainment Robots Toshihiro TETSUI1 Eiichi OHKUBO1 Noriko KATO2 Shin’ichi SATO3 Ryuhei KIMURA1 Mitsuru NAGANUMA1 Robot Assisted Activity (RAA) and Robot Assisted Therapy (RAT) were put into practice and shown to be effective at the rehabilitation ward and elderly persons’ nursing home using commercially available entertainment robots. Animal Assisted Activity (AAA) and Animal Assisted Therapy (AAT) are well known and modeled on this study. Remote control of the robot that is impossible in the case of an animal showed very effective in the rehabilitation practice and Robot Assisted Rehabilitation (RAR) was proposed. However there are several problems for the remote controlled RAR to receive wide recognition as the candidate of the complementary medicine. One of the problems is that the robot operator is needed besides intervener or therapist. To solve this problem a small and simple operating terminal with www browser was developed aiming it can be used by the intervener. In this paper, preliminary studies of RAA/RAT are reported laying stress on rehabilitation application and improvement of the robot remote control system. Keywords : Robot Assisted Activity, Robot Assisted Therapy, entertainment robot, rehabilitation, wireless LAN 1.はじめに 合いの中から癒しの効果を引き出し,治療を 現在我が国は世界に類を見ない超高齢化社 行うもので,音楽療法・箱庭療法などととも 会を迎えようとしている.近年の改革によっ に患者の QOL(Quality of Life,生活の質) て,医療現場は特に大きな変化の渦中にあり, の向上や治療上の効果が認められている.し 中でも,介護・リハビリテーション分野では かし,生きた動物を扱うため生体由来のアレ 診療報酬など医療保険制度の改訂により,ス ルギー・感染症などの問題点が指摘されてお タッフの人員削減や患者の入院日数短縮など り,ハンドラーと呼ばれる動物の扱いに関し 様々な影響を受けている.このような状況に て知識と経験を有する人の介在も規定されて おいて,患者に対する物理的なケアもさるこ いる.従って,幾多の研究により効果がある とながら心のケアの重要さが指摘されている. ことが示されている 1,2)にもかかわらす,病院 一般的にアニマルセラピーとして認知されて などの医療現場に導入するには多くの困難が い る 動 物 介 在 活 動 ( Animal Assisted 伴うのが現状である.生きた動物をロボット Activity :AAA ) と 動 物 介 在 療 法 ( Animal に置き換えることにより,これらの問題の多 Assisted Therapy :AAT)は動物と人との触れ くは解決されるのではないかと考えたことが ─────────────────────── ✉ naganuma@ntu.ac.jp 41 鉄井俊宏 大久保英一 加藤範子 本研究着手の動機である. 近年のメカトロニクス技術・情報処理技術 佐藤真一 木村龍平 永沼充 を兼ね得るようにするため,より使いやすい システムの検討に取り組んだ. の進歩はロボット産業に大きな変革をもたら している.特徴的な最近の傾向は,生産分野 2.ロボット介在活動/療法概要 でのロボット技術の成熟に伴い,人と共生す 小児病院あるいは病院の小児病棟やリハビ る分野でのロボット技術開発である.一般市 リテーション部門,指定介護老人福祉施設(特 民向けのロボットにも工業生産技術が生かさ 別養護老人ホーム) ,重度心身障害者施設など, れ,生活支援ロボットやエンタテインメント 延べ9カ所の施設において 200 回以上のロボ ロボットが市販されるようになっている.し ット介在活動および介在療法を実施した.こ かしながら,セラピーを志向したロボット開 こでは主として高齢者の被験者に重点をおき 発は緒についたばかりで,一般に入手可能な その実施概要について述べる. セラピー向けロボットは産業技術総合研究所 のパロのみである 3) ロボット介在活動(RAA)とロボット介在療 .本稿では,ロボットと 法(RAT)の違いは次の点にある.RAA は基本 して市販のエンタテインメントロボットを用 的に被験者(患者)がロボットに親しみ楽し い,これを介在活動のツールとして用いた場 んでもらえれば良いという考えに立つのに対 合のロボットと人の相互作用について検討を し,RAT は目的に治療が加わるため,医療者 加え,ロボットセラピーの可能性を探る.さ の指導の下に明確な目標を設定し客観的に効 らに,単に動物を置き換えるのみならず,ロ 果が示されることが必要である.一般的には ボットを用いることで生まれる新たな特徴を アロマセラピーのように療法の定義から逸脱 検討することも本研究のねらいである. した用法も見られるが本稿では両者を分けて 我々は小児科病棟やリハビリテーション科, 考える. 特別養護老人ホーム等において動物のロボッ ト置き換えは可能かという視点からロボット 介在活動を開始した 4) 2.1 ロボット介在活動/療法のねらい .当初は,簡単な人工 RAA/RAT の実施効果は,動物を用いた場合 知能プロセッサを搭載した自律動作ロボット と同様,大きく分けて物理・心理・社会の 3 を恰も動物のように振る舞わせたが,ロボッ つの側面から考える事ができる トが簡単に外部制御可能であるという動物に 果は体を動かすことによる身体的機能の回復 は無い特徴を活かし,自律動作型ロボットに 効果であり,精密に繰り返すことが得意なロ 加えて遠隔操作型ロボットの導入も試行した ボットの特徴が生かされている.心理的効果 4) は主に注意持続や感情表出などの面に現れ, .遠隔操作型ロボットは患者・介在者(セ 5) .物理的効 ラピスト)に的確にレスポンスできるため, こころの QOL の改善に資する.社会的効果は, 主にリハビリテーション科における試行では, 例えば会話の発生による周囲の人とのコミュ アンケートなどから概ね良好な評価を得るこ ニケーション能力の向上等に現れ,集団で生 とができた.一方,現在の遠隔制御システム 活しながらも没交渉となりがちな特養老人ホ は,ロボットの機能を全て網羅していること ームなどでは重要な項目である.従来のロボ もあり,介在者・セラピストの他に熟練した ットを使ったリハビリテーションにおいては, オペレータが必要である.この現状を改善し, その大部分が物理的・身体的効果を狙ったも 将来的には介在者・セラピストがオペレータ のであり,心理的・社会的効果を狙った研究 42 エンタテインメントロボットを用いたロボット介在リハビリテーションの試み は皆無である.本研究においては RAA/RAT の に対して実施内容を説明しインフォームド・ 心理的・社会的効果に視点を置き,その効果 コンセントを得た上で,写真撮影の可否など の評価を通じて RAA/RAT が補完代替医療の一 を名簿に添えて提出してもらった.一方実施 端を担えるかどうか検討した.効果の評価法 する側の研究者・学生等には体調が万全であ としては脳波測定や脳血流測定などのミクロ ることと守秘義務を遵守することを毎回確認 な評価法は採用せず,被験者自身に現れるマ し,これにもとづき各自が署名した参加名簿 クロな現象を捉えることとした.その理由は を作成して写しを施設側に提出した. 現状の技術と設備では評価手段が被験者の状 態に影響を与えるからである. 2.3 ロボット介在療法(RAT) 主な実施場所は市立甲府病院(402 床)(4) 2.2 ロボット介在活動(RAA) および所沢ロイヤル病院(332 床)のリハビ 特別養護老人ホームサントピア(東京都八 リテーション部門である.RAA の場合と異な 王子市,入所者数 100 名)において定期的(1 り,介在には作業療法士,理学療法士,言語 回/月)に実施した.あらかじめ施設側が指 聴覚士があたり,療法士の治療計画に沿って 名した 30 名を 2 組に分け 1 組 30 分を目安と ロボットの動きや実施時間などが決められた. した.基本的に施設の職員は介入せず介在者 当該施設におけるリハビリテーション訓練の の役割は学生が受け持った.HDSR(改訂長谷 一環として自律動作または遠隔操作のロボッ 川式簡易知能評価スケール)は 30 近くから 0 トを用いた療法を取り入れる形である.被験 まで幅広く分布している.毎回の被験者数と 者の大半は脳内出血あるいは脳梗塞などによ 同数程度の介在者が被験者とともにロの字あ り身体麻痺症状を引き起こしている高齢者で るいはコの字に並べられたテーブルを囲み, あり,脳の高次機能の低下にともなう意識障 テーブル上には各種のロボットやぬいぐるみ 害をきたし,療法士とのコミュニケーション を配置した.ロボット介在活動であるので, も十分行えないケースも多い.評価法として 特別な目的は設けず,被験者に喜んでもらえ は実施前後の血圧・脈拍ななど基礎データ取 ればよいという姿勢で臨み,毎回のトピック 得のほかに適宜皮膚電気反射(GSR)などの測 ス(たとえば,花見,夏祭り,クリスマス, 定も実施した.図 1 に典型的な配置を示す. 節分,など)を決め施設の年中行事との融和 ロボットの操作者は被験者の背後に位置しそ をはかった.あらかじめ施設から被験者家族 の所作が被験者に影響しないようにするとと 表 1 RAA と RAT に用いたロボット Table 1 Robots used for RAA and RAT 図 1 遠隔操作時の配置例 Fig.1 Configuration of remote operation 製品名 AIBO_ERS-210/220 AIBO_ERS-311/312 AIBO_ERS-7 NeCoRo BN-1わがままカプリロ あかちゃんチワワ こっちにおいで愛犬こはる ニャーミー 姿 犬 犬 犬 猫 猫 犬 犬 猫 メーカー SONY SONY SONY OMRON BANDAI イワヤ㈱ イワヤ㈱ セガトイズ 43 鉄井俊宏 大久保英一 加藤範子 もに,被験者に対して半身に構えた療法士と のコミュニケーションを可能にし,RAT 実施 状況を理解できる位置取りとした. 佐藤真一 木村龍平 永沼充 3.ロボット介在リハビリテーション 本章では市立甲府病院および所沢ロイヤル 病院のリハビリテーション部門において実施 した RAA/RAT について,特に療法を指向した 2.4 使用ロボットについて ロボット介在リハビリテーションを中心に述 本研究において使用したロボットは全て べる. 市販品である.主なものを表.1 に示す.ほぼ 全て動物型のロボットである.市販ロボット 3.1 被験者・介在者・ロボットの配置 としては人の形をしたものもあるが,動物の RAA/RAT における,被験者と介在者および 方が感情を移入し易いことや 2 足で立つ形は ロボットの相互関係の典型的な例を図 3 に示 不安定であることなどから人型のロボットは す.最もシンプルな形は(a)に示すようにロボ 避けた.また,比較のためにロボットではな ットと被験者が一対一となる形である.AAA く同じような形をしたぬいぐるみも合わせて あるいは AAT の場合にはペットを飼っている 使用した.表.1 の中で,ソニー製 AIBO はユ 状態に当てはめることができる.ペットとの ーザが比較的簡単にロボットの動作をプログ 共生が入院患者等の状態に良い影響を与える ラムできるため被験者に合わせたパフォーマ ことは多くの研究で指摘されているが,動物 ンスを構築できる.例えば,ロボットに装着 をロボットに置き換えた場合,現状のロボッ された各種センサーと内部組み込み関数を組 ト技術では,特に本研究で対象とする高齢者 み合わせることにより被験者とのインタラク においては,動物のような効果を期待するこ ティブな環境が実現される.さらに,同型の とは難しい.その理由は現状での RAA/RAT の ERS7 および ERS200 シリーズは無線 LAN カー 効果がロボットの「刺激性」に由来している ドを標準装備しているためインターネット回 ためであると考えられる.すなわち,刺激は 線に接続して遠隔制御することが可能である. 長続きせず飽和特性を持つのでロボット−被 本研究では図 2 に示すように,ロボットと無 験者の関係を長く維持することが難しい.本 線 LAN アクセスポイント間は IEEE802.11b プ 研究での基本的な形は(b)に示すように被験 ロトコルで結び,サーバーあるいは制御 PC 間 者,介在者とロボットが 3 者関係を構成する は有線 LAN で結んだ.有線 LAN の方がより信 頼性が高いためである. (a) 無線LAN (IEEE802.11b 11Mb/s) ロボット (c) (IEEE802.3 100Mb/s) 無線LAN アクセスポイント 制御用 サーバー 制御用PC 図 2 ネットワーク接続環境 Fig.2 Network configuration for remote control 44 (b) 有線LAN (d) 患者 ●被験者 (e) ロボット 介在者 図 3 被験者・ロボット・介在者の相互関係 Fig.3 Relationship between patient, robot and intervener エンタテインメントロボットを用いたロボット介在リハビリテーションの試み 形である.この場合には,被験者−介在者, が可能である.複数のロボットと被験者がひ 被験者−ロボット,介在者−ロボットの 3 つ とつのテーブルを囲んで実施する(e)のよう の関係性が考慮の対象となる.通常のセラピ な場合もある.この場合はグループで行うプ ーでは多少の小道具を使うことはあっても基 レイセラピーと考えて良い.実施例を図 4 に 本的には被験者−介在者の一対一の関係性形 示す.使用ロボットの一つである AIBO にはピ 成が一般的である.ロボットはその形が動物 ンク色に反応してその方向に移動する習性が に似ている上に動きがあること,音や音声を 基本プログラムとして組み込まれている.こ 発することから被験者に刺激を与える対象に れを利用し,被験者が自分の好みのロボット なり得る.そのため,ロボットを一つの共同 を決めてピンク色の旗を使って呼び寄せ,そ 注視対象とした 3 者関係を作りやすい.時間 の達成感や手を動かしたり体を乗り出す動作 の進行とともに,被験者はロボット相手か介 から心理的・物理的な状態改善をねらってい 在者相手の 2 者の関係にシフトする.我々の る 実施結果では多くの場合,介在者との関係性 することにより,リハビリテーションプログ が強くなる傾向にあった.すなわち,ロボッ ラムを組むことができる. 7) .この場合も一部のロボットを遠隔操作 トが発する刺激の程度が弱まるにつれロボッ トとの関係性が弱まるのではないかと考えら れる.一方,認知症の症状が見られる被験者 の一部には自らロボットとの間に強い関係性 を築きロボットに繰り返し話しかけるケース も見られた.発展形としてロボットの数を 2 台もしくはそれ以上に増やした(c)の様な組 み合わせがある.この場合には,複数のロボ ットに対して被験者が働きかけをすることか ら,心理的なリハビリテーションが可能にな 図 4 グループによる RAA/RAT 実施例 Fig.4 Typical group RAA/RAT るのではないかと考えられる.アスペルガー 症候群の女児に対するロボットを使ったプレ 3.2 非侵襲評価法の検討 .この例では RAR は治療の一環であるので効果の評価が ロボット群は自分自身を含めた人間関係の投 重要である.被験者の心身状態を評価するパ 影対象となり客観的思考の訓練の助けになっ ラメータには血圧・脈拍のようなバイタルデ ている.一方,1 台のロボットに複数の被験 ータのほかに唾液や尿,血液の化学成分分析 者を組み合わせる形態も考え得る (図 3(d)). に基づく評価法があるが,化学分析のために この場合は刺激性の強いロボットを共同注視 は検体の採取が必要であり,被験者に与える のターゲットとして用いるので,複数の被験 負担が大きい.また,これらの方法では実施 者間のコミュニケーションを促進し,「社会 の前と後の比較が主になり,実施中のダイナ 性」を醸成する効果が期待できる.さらに, ミックな変化は追いにくい.心電図,脳波測 3.4 で結果の一部を紹介するように,遠隔操 定は時間的な変化を詳細に記録することが可 作により注視対象のロボットに意味のある動 能で被験者の心理状態を知る良い手段ではあ きをさせることによりその効果を高めること るが,電極を装着することによる影響が本来 イセラピーはその一例である 6) 45 鉄井俊宏 大久保英一 加藤範子 佐藤真一 木村龍平 永沼充 ないので,視線の動向を主として現場で観察 の効果をスクリーニングする可能性がある. 者が記録した.その方法は 10 秒毎にその瞬間 に被験者が眼差しを向けている対象を5つ程 度に分類記録するやりかたである.記録しな い時間帯は無視することから生ずる誤差を評 価するために連続的に全ての視線の動きを追 った結果と比較した. これを図 6 に示す. 視線先は「ロボット」,「介在者」,「隣の被験 (a) 者」,およびこれらに含まれない場合で「近く」 と「遠く」の5つのカテゴリーに分類した. 図中の数値は(a)では積算時間,(b)では回数 である.二つのグラフを比較すると明らかな ように,10 秒のインターバルを取って計測し てもほぼ問題ないことが示された.一つのカ テゴリーに 2%の誤差を許せば 20 秒間隔でも (b) 良いという結果も得られている 図 5 半側空間無視被験者の顔の動き 遠隔操作ロボット無し(a)と有り(b) Fig.5 Motion tracking of the patient with unilateral spatial neglect, without robot (a) and with robot (b) .被験者の 身体的活性度が低く動きが緩慢なため,比較 的間隔を置いた計測でも誤差が少ないと考え ることができる. 実際に脳波計測定の前後で唾液アミラーゼに よるストレス評価を行ったところ測定後のス 内側の円:(a) 外側の円:(b) 38回 トレス値が増大していることが明らかになっ た.本研究では,被験者に影響を与えずに心 理的な状態を評価する手段として,被験者を 5回 遠方から観察する方法を 2 種類採用した.被 4回 験者の身体各部に装着したマーカーの動きを 8) 359.5 秒 18.1秒 36.4 秒 1465秒 解析するモーショントラッキング法と被験者 の視線の動きを目視記録する方法である.前 者の測定例を図 5 に示す.被験者は半側空間 無視の症状をもち右側の空間が意識の中に入 らないため,額と鼻の頭に付けたマーカーを 141回 ロボット 介在者 隣 近く 遠く 図 6 視線観察の妥当性検証 (a)連続観察と(b)間欠観測 Fig.6 Eye contact analysis for (a) continuous and (b) intermittent observations 追跡すると同図(a)のように左側の空間に集 この方法により計測した 9 組の被験者と介 中していることが分かる.左側空間でロボッ 在者の視線の分散を図 7 に示す.分散が大き トを認識させ,刺激性を保ちつつ遠隔操作に い場合,介在者や被験者の視線が動き回り, より右側空間移動させ,意識を誘導すること 集中度に欠けていると考えることができる. により,同図(b)のように顔の動きが空間的に 図から明らかなように被験者と介在者との視 一様になることが示される. 線の動きの間には相関があることがわかる. 後者の被験者の視線評価に関しては任意に すなわち,介在者の集中の度合いや興味が被 動く人の瞳の動きを自動計測する装置はまだ 験者に影響を与えていることが考えられる. 46 被験者視線の分散値 エンタテインメントロボットを用いたロボット介在リハビリテーションの試み 表2 RAR前後の血圧変化 Table 2 Measured blood pressure before and after RAR 1.2 1.0 0.8 0.6 0.4 0.2 0 0 0.2 0.4 0.6 0.8 1.0 1.2 介在者視線の分散値 図7 被験者と介在者の視線分散の相関 Fig.7 Dispersion relation between patient and intervener さらに,被験者よりも介在者の視線の分散 が大きいことから,介在者の方が周りの影響 を受けやすいと推測される.同時に測定した 被験者の手の動きとの相関においては被験者 の視線分散が小さいほど手が良く動く傾向が 見られた.このことは集中の度合いが高いほ ど手が活発に動くことを示唆している 9). 3.3 RAR による改善効果例 遠隔制御ロボットを用いたリハビリテーシ ョン訓練の前後の血圧を 7 人の被験者の延べ 10 回の試行に関して測定した結果を表.2 に 示す.最高血圧は 10 例中 6 例,最低血圧は 10 例中 9 例が実施後で減少した.ただし,最 高血圧の平均減少値は 2.4mmHg でありこれは 測定のばらつきを越えているのでこれをもっ て効果有りとすることは危険である.一方, 最低血圧では平均減少値が 9.9mmHg であり有 意の減少と考えることができ,RAR により何 らかのポジティブな効果を被験者に与えてい ると認められるが,確証を得るためには RAR を実施しない対照群を設定した上でより多く のデータに基づいた統計処理をする必要があ る. 皮膚電気反射(GSR)の測定結果は被験者の 試行 1 2 3 4 5 6 7 8 9 10 平均 最高血圧 実施前 実施後 107 105 159 144 114 110 156 164 156 164 143 145 114 113 158 149 138 140 156 143 140.1 137.7 最低血圧 実施前 実施後 77 72 93 85 74 71 78 72 78 70 100 69 90 74 69 83 80 78 99 65 83.8 73.9 覚醒状態を示す評価法として用いることがで きる.約 30 分のリハビリテーション訓練中に 被験者の指に軽く装着した 2 つの電極からの 電気信号を記録し,その推移から交感神経優 位か副交感神経優位かを判断する.具体的に は実験開始時点での信号出力を原点とし、そ こからの電位変化をレコーダー上で観測し交 感神経優位かどうか判断するので、出力電位 の絶対値は考慮していない.表.2 の被験者群 とは別の 7 名の被験者群に対して測定した GSR の結果を表.3 に示す 10).通常のリハビリ, 自律モードおよび遠隔操作モードロボットを 用いたリハビリ各 10 分程度を無作為に組み 込んで実施した結果である.通常のリハビリ と遠隔操作ロボットによるリハビリでは交感 神経優位の被験者が 7 例中 5 例で見られ覚醒 状態の改善が示唆されているのに対し,自律 モードロボットを用いた場合では 7 例中 1 例 しかなく 2 例は逆に副交感神経優位に推移し ている.このことは,リハビリ訓練において は自律モードではなく遠隔操作モードのロボ ットが有効であることを示唆している.比較 対照群として選んだ 60 歳台の健常者女性 3 名 では全例で交感神経優位に推移した. 47 鉄井俊宏 大久保英一 加藤範子 表 3 皮膚電気反射(GSR)による RAR の評価 佐藤真一 木村龍平 永沼充 Table 3 Evaluation of RAR by Galvanic Skin Reflex No. 疾患 年齢 HDSR 通常のリハビリ 自立モードロボット 1 右中脳出血 76 10 交感神経優位 副交感神経優位 2 脳梗塞 78 0 交感神経優位 変化無し 3 右急性硬膜下出血 79 8 変化無し 変化無し 4 右視床小脳出血 87 5 交感神経優位 変化無し 5 左視床出血 87 6 変化無し 変化無し 6 右視床出血 76 7 交感神経優位 副交感神経優位 7 右視床出血 72 16 交感神経優位 交感神経優位 遠隔制御ロボット 交感神経優位 交感神経優位 変化無し 交感神経優位 変化無し 交感神経優位 交感神経優位 3.4 遠隔操作による場の醸成 特養老人ホームにおいてはたとえ同室して いても入所者間のコミュニケーションはほと んどないのが現状である.高齢者間の相互コ ミュニケーションがはかれれば QOL の改善に 大きな効果があると考えられる.そこで,遠 隔操作ロボットを共同注視対象としたコミュ ニケーション場の醸成を試みた.その様子を 図 8 に示す 11).認知症を患う被験者 2 名 (HDSR (a) はそれぞれ 15 および 20)は互いに同じ方向 を向き車椅子のまま机に着く.机上はロボッ トが動き回るスペースとして準備されている. ここではロボットが口にくわえて運ぶバスケ ットを共同注視の対象としてシナリオを組み, 2 名の被験者間にコミュニケーションの糸口 を作ることが狙いである.まず図 8 (a)に示 すように,左側の被験者がバスケットをロボ (b) ットに加えさせる.被験者の手の動きに合わ せて遠隔操作によりロボットの口を開きバス ケットを保持する.必要に応じて介在者が促 す.同図(b)ではロボットが右側の被験者のも とに向かうよう遠隔操作されている.右側の 被験者はロボットが自分に向かっていること を理解し手を叩いて呼び寄せている.同図(c) でバスケットを受け取った被験者はロボット に対して「おりこう」をしてあたまをなでる. 一方が何か動作しているとき他方はそれを注 意深く見つめていることが図から観察される. 1 回の試行が終わると授受の立場を変えて同 48 (c) 図 8 遠隔操作ロボットによるコミュニケーション場 の醸成 Fig.8 Creation of communication field by remote controlled robot エンタテインメントロボットを用いたロボット介在リハビリテーションの試み じことを繰り返した.このようなことが可能 用プログラムにより,ロボットに組み込んだ なことの理由の一つは,ロボットが一定レベ モーションが動作する仕組みとなっている. ルの刺激を被験者に与え続けることができる からである.遠隔操作によりロボットの動作 に意味を持たせ,その場にストーリー性を付 与することにより被験者の興味を維持するこ とができると考えられる.これまでの結果は 定量評価の前段階であり RAA の域を出ていな い状況ではあるが,認知症がある程度進んだ 施設入居者等のコミュニケーションをはかり 社会性を増す一つの方法として有望であると 考えられる. 表 4 開発システムの概要 Table 4 Summary of developed system 使用ロボッ AIBO ERS-210A(ソニー) 無線LANカード内蔵 ト OPEN-RベースR-CODEによるモーションデータを組み合わせた ロボット制 カスタマイズプログラム 御方式 モーション数 基本姿勢制御:3 行動制御:2 オリジナルダンス:1 無線LAN IEEE802.11b(11Mbps) サーバー Intel Pentium3 1GHz, RAM 512MB, Windows 2000 Server SP4 システム WWW Server: Apache for Win32 Ver.2.0.19 Borland C++ for Win32によるソケットプログラム使用 CGI C言語ベースCGI 4.操作コンソールの改良 前章の結果から遠隔操作を取り入れること により RAA/RAT のより効果的な実施が可能で あることが示された.しかし遠隔操作 RAA/RAT が普及するためには大きな課題がある.それ は介在者の他にロボット操作者が必要なこと である.そこで,介在者自身が介在中に操作 できる環境の開発を目指して簡易システムを 構築した. 4.1 PC 操作の簡素化システム 図 9 開発した遠隔操作画面 Fig.9 Designed remote control browser 本研究で使用した遠隔操作ロボットである ロ ボ ッ ト 制 御 用 プ ロ グ ラ ム は OPEN-R SDK ソ ニ ー 製 AIBO に は 制 御 ソ フ ト (AIBO (Software Developers Kit)と呼ばれる C++言 Navigator 2 お よ び AIBO Entertainment 語ベースの高度開発環境で開発し,Internet Player) が供給されている.これらのソフト 上の通信手順の一つである telnet プロトコ の本来の開発目的はエンタテインメント用で ルを用いたプログラムをベースにした.操作 あるので,コンピュータ操作に手慣れたユー 画面を図 9 に示す.大きく基本動作,行動制 ザを対象としており操作画面は複雑である. 御,オリジナルダンスの 3 つのカテゴリーに 一方,実際に特別養護老人ホーム入居者等に 分けてある.基本動作には「伏せ」,「立ち」, 対応して操作した結果,RAR で必要となる動 「座り」の 3 種,行動制御には「歩き」や前 作はさほど多くないことが明らかになった. 後に「数歩歩く」など 4 種,これにラジオ体 そこで必要最低限に動作を絞り込んだシステ 操や演歌に振りを付けた踊りなどのオリジナ ムを試作した 12).システムの詳細を表 4 に示 ルダンス 6 種類を加えて合計 13 個のアイコン す.端末からサーバーへリクエストが行なわ しかなく,療法士のような PC 初心者にも十分 れると,サーバーにあるモーション呼び出し 扱うことができる. 49 鉄井俊宏 大久保英一 加藤範子 佐藤真一 木村龍平 永沼充 4.2 操作端末の小型化 操作画面は簡素化できたとしても PC 画面 をマウスでクリックする必要がある限り療法 士が患者に対応しつつロボットを操作するこ とは依然として難しい.開発したシステムの 操作端末としては WWW ブラウザが搭載可能で あればハードウェアに依存せず動作可能であ る.そこで,タッチパネル機能の付いたパー ムサイズの端末に端末側プログラムを移植し た.使用した端末は HP 社の iPAQ pocket PC シリーズである.この機種には無線 LAN が内 図 10 開発した RAT 用小型遠隔操作端末 Fig.10 Developed small terminal for remote RAT 蔵されており療法士がポケットに入れて持ち 歩くことも可能である.同シリーズの機種の 一つである rx1950 にプログラムを搭載した 外観を図 10 に示す.掌に収まるサイズで,厚 さは 13.5mm である.このシステムを実際に特 養老人ホームで指向している様子を図 11 に 示す.コンソール画面のレイアウトなど改善 の余地は残されているものの基本的に現場で の操作が可能であることが示された.また, 開発したシステムはネットワーク接続を設計 すれば携帯電話などの Internet アクセス機 能でも動作させることが可能である. 図 11 小型操作端末を用いた RAA の試行 Fig.11 Trial of RAA using developed small terminal ーションが主体となる.すなわち,触る,撫 でる,一方的に話しかけるといった片方向の 5.HRI 視点からの考察 行動が主となるが,特別なケースとして失語 ロボットおよび動物を介在させた活動/療 症の治療がある.一般に失語症の治療は言語 法についてヒューマンインターフェース視点 聴覚士が患者の発話機能を引き出すため様々 から考察を加える.RAA/RAT および AAA/AAT なプログラムを実施するが,ロボットの人工 どちらにおいても,ロボット/動物と人とのイ 的な合成音による語りかけも有効な手段とし ンターフェースは被験者(患者)とのインタ て考えられる.すなわち,ロボットが有する ーフェースと介在者(療法者)とのインター 刺激性が患者の注意力を維持し,患者が聞き フェースの 2 種類がある.まず,患者とロボ 取りやすい周波数スペクトルで合成音を生成 ット/動物のインターフェースについて考え できるからである.さらに,患者とのインタ る.本研究で対象とする高齢者は多かれ少な ーフェースとしてロボットインタフェースが かれ脳の高次機能に疾患を抱えていることが 動物インターフェースと大きく異なる点は, 多い.従って,文脈を理解した上でコミュニ 患者状態の情報取得である.映像・音声その ケーションを取ることは困難であり患者との 他の情報センサーとメモリーを組み合わせた インターフェースはノンバーバルコミュニケ インターフェースは,個人情報の取得に対す 50 エンタテインメントロボットを用いたロボット介在リハビリテーションの試み る対策を必要とするが,新たなロボットセラ ある. ピーの展開を可能にすると考えられる. 次に,介在者(療法者)とロボット/動物の 謝辞 インターフェースについて考える.動物とハ 本研究は横山章光氏(帝京科学大),浜田利 ンドラーとのインターフェースでは単に発話 満氏(筑波学院大) ,有泉宏紀氏・鷹左右由紀 にとどまらずしぐさ等すべてが利用される. 氏(市立甲府病院リハビリテーション室)と 一方,ロボットと介在者(療法者)とのイン の有益な討論,フィールドワークにおいて被 ターフェースは比較的単純であり通常の情報 験者となっていただいた皆様ならびに帝京科 転送インターフェースと大差はないと考えて 学大学動物介在活動部の皆様の協力により行 良い.インターフェースが明確に定義されれ われた.本研究の一部は平成 16-18 年度学術 ばネットワークへの接続も可能となることか 研究振興資金(日本私立学校振興・共済事業 ら遠隔地に居住する操作者によるロボット操 団)の援助を受けた.ここに記して感謝する. 作も可能となる.課題となるのは療法者が操 作できるインターフェースの操作性であり, 遠隔地からの操作の場合には介在現場の状況 参考文献 1. E.Friedmann, A.H.Katcher, J.J.Lynch and を把握する映像・音声を取得するインターフ S.A.Thomas, ェースも重要となる. one-year “Animal survival companions and of patients after discherge from a coronary care unit”. 6.まとめ Public Health Reports 95(1980), 307-312. 市販のエンタテインメントロボットを用い 2. M. M. Baun, N. Bergstrom, N. F. Langston, たロボット介在活動/療法(RAA/RAT)につい and L. Thoma : Physiological Effects of て高齢者を対象としたリハビリテーションを Human / Companion Animal Bonding, 中心にロボットを使った新しい治療方法やそ Nursing Research Vol.33, No.3, pp.126-129, の可能性、及び試行の中間結果を報告した. 1984 遠隔操作ロボットを用いた RAA/RAT において 3. T. Shibata : An overview of Human は血圧変化,皮膚電気反射測定等において効 Interactive Robots fpr Psychological 果が認められた.より明確に RAA/RAT の効果 Enrichment, Proc.of the IEEE, Vol.92, を確認するためには対照群を設定した上で被 No.11, pp.1749-1758, (2004) 験者数を増やすことが必要である.一方,遠 4. E. Ohkubo, H. Umino, M. Shioya, Y. 隔操作インターフェースに関しては,介在者 Takaso, H. Ariizumi, S. Sato, N. Kato, R. あるいは療法者自身によるロボットの制御を Kimura, and M. Naganuma : Evaluation of 可能にするためのコンソールの簡略化および Robot Assisted Activity and Therapy using 小型化を実現し操作性を確認した.ロボット Wireless LAN Controlled Pet-type-robots, 介在療法が補完代替医療の一つとして認めら Proc. of CME2005, pp.519-520, May 15-18 れるためには多くの解決しなければならない 2005, Kagawa, Japan 課題が残されており,試行する施設の増加を 5. 浜田利満: ロボット・セラピー・システム, はかりデータを蓄積するとともに,ロボット いのちの倫理学(桑子敏雄編著),コロナ社, 開発にフィードバックしてゆくことが重要で 第 7 章, (2004) 51 鉄井俊宏 大久保英一 6. 高橋礼花,宮尾益知,奥山真紀子: アイボを 用いたプレイセラピーを行ったアスペルガ 加藤範子 佐藤真一 木村龍平 永沼充 eye contact analysis, Proc. of SICE Annual Conference 2005, pp.2576-2579, (2005) ー症候群の 11 歳女児, 第 5 回,計測自動制 10. 有泉宏紀,鷹左右由紀,佐藤真一,海野仁, 御学会 SI 部門学術講演会論文集 pp.86-87 大久保英一,木村龍平,永沼充: ロボット (2004) 介在療法における遠隔操作ロボットの有効 7. 加藤範子,河野真樹江,登野盛美紀,中村友 美,金子麻衣子,近藤佳奈,関口真希子,山 性, 第 5 回,計測自動制御学会 SI 部門講演 会論文集 pp.102-103 (2004) 岸太一,岡澤宏樹: 高齢者のためのロボッ 11. E. Ohkubo, T. Tetsui, S. Sato, N. Kato, R. トセラピー, 第 5 回,計測自動制御学会 SI Kimura, and M. Naganuma : Utilization of 部門学術講演会論文集 pp.98-99 (2004) remote control technique for effective RAA 8. 塩谷盛泰,大久保英一,木村龍平,永沼充: and RAT, Proc. of SICE-ICASE International ボット介在活動における視線観察手法の評 Joint Conference, pp.3386-3390, Oct.18-21 価, 第 6,計測自動制御学会 SI 部門学術講演 (2006) 会論文集 pp.201 -202 (2005) 12. 大久保英一,海野仁,塩谷盛泰,伊藤秀一, 9. M. Shioya, E. Ohkubo, T. Sasaki, R. 木村龍平,阿永沼充: ロボット介在活動・ Kimura, and M. Naganuma : Evaluation of 療法向け簡易遠隔操作システムの開発, リ temporal change of patient concentration ハビリテーションネットワーク研究,Vol.4, during Robot Assisted Activity by means of No.1, pp.43-49 (2006) 52
© Copyright 2025 Paperzz