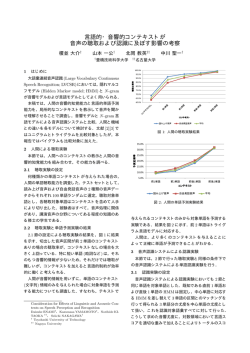
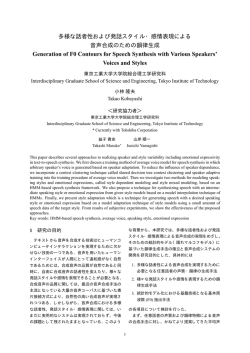
エルゴディック隠れマルコフモデルを用いた ミメシスループの構造設計 ○高野渉 東大 中村仁彦 東大 ! " # $% はじめに ヒューマノイドロボットの運動能力が急速な発展を 遂げている一方,その運動は,設計者があらかじめプ ログラムすることが多く,多種多様な運動をする際に は,設計者に大きな負担が掛かる.様々な環境下で適切 に行動するヒューマノイドの実現には,多数の運動パ ターンを自動的に獲得する学習能力が必要不可欠であ る.多くの運動パターンを認識,生成する手法として模 倣学習 があげられる.特に,見まねを通じた行動の 認識と生成の循環機能は,シンボルの創発,操作等の高 度な知能の根源であるとするミメシス理論 が,認知 心理学の分野において提唱されている.これを軸とし て隠れマルコフモデル を用いた,他者の行動 の観察から動作パターンを抽象化し,抽象化された表 現である原始シンボルから自己行動を獲得するヒュー マノイドの知能構築の研究が行われている .従来 のモデルは,数多くの運動を見まね学習させるには行 動数に応じたモデルを用意する必要があり,各モデル に学習させる運動パターンは予め人の手によって分節 化されたデータである.しかし,人間は観察した運動 パターンを自ら分節化し,効果的に学習を行う.この ような背景のもと,本研究では自ら行動を分節化し, つのモデルで多くの行動を学習できるエルゴディック を提案することを目的とする. エルゴディックHMMを用いた ミメシスモデル システムの概要 に提案するエルゴディックHMMを示す.ここ で, ½ は状態の有限集合, ½ は出力記号の有限集合, は状態 は記号出力確率分布を表 遷移確率分布, す.本モデルは,従来の HMMと異なり 任意の状態から他の任意の状態へ遷移できるモデルと なっている.ただし本研究では,状態遷移に関して近 傍の状態間のみ遷移可能という条件を付している. time q q q k+3 q q q k+1 q k+2 k+1 q k+4 qk q3 a33 q qN q1 b1( q time a21 a a12 q2 23 ) b2( ) u(1) u(2) u(3) u(4) b3( ) u(t) time & ! " HMMのパラメータ推定 HMMの遷移確率,出力確率のパラメータを通常の EMアルゴリズムに基づいて推定すると 与えられた 時系列データを出力する確率が最大になるようにパラ メータを決定する処理を全状態領域にわたり行うため, 新しい運動パターンを学習する際に,既学習パターン が破壊されてしまう.そこで,以下のような方法によ り既学習パターンを保持しながら新しい学習パターン を学習させる. アルゴリズムにより学習パターンに対す る最尤度を与える状態遷移系列を算出する. 最大尤度状態系列の近傍領域のみ考慮したEM アルゴリズムによってパラメータを更新する. この2段階の手順を繰り返すことによりHMM パラメータの最尤推定を行う. による行動の認識・生成 前節で述べたモデルの有効性を検証するため, 「足踏 み」, 「万歳」, 「ダンス」, 「キック」, 「パンチ」, 「四股」, 「スクワット」, 「投てき」, 「前屈」のモーションキャプ チャのデータを学習させた. は, × 個の状態を 次元に配置したHMMを用いた場合の学 習初期段階および十分にパラメータ推定を行った段階 における各運動パターンの状態遷移を表している.学 ' ()* × )* + (, ,! -+ 習初期段階において状態遷移がカオス的な挙動を示す のに対して,学習を行った後は各運動パターンに対し て自己組織的にアトラクタ領域を構成している.これ は,フリーマンのウサギの嗅覚系の実験 でみられ るように,嗅球の集合電位が未知のにおいに対してカ オス状態をとるが,既知の臭いに対しては周期状態に 近いアトラクタを形成する現象と酷似している.また, 片腕 自由度,片足 自由度,合計 自由度の小型 ヒューマノイドロボット を用いて,獲得した運動パ ターンの生成を行った. は,ヒューマノイドにお ける運動生成のアニメーション表現を示す. は, モデルから生成される運動パターンと学習に用いられ た元の運動パターンの比較を表す.元の初期状態が異 なるために位相差があるものの,およそ学習の関節角 度の軌道を再現することができている.また,従来モ デルでは確率的処理に起因するノイズを複数回の生成 試行を行い,平均化処理を施すことにより解消してい るが,今回提案したモデルでは,近傍に類似した状態 が形成され,状態遷移はその近傍にのみ限定されてい ることから,1回の生成試行でほぼ元の運動パターン を生成可能である. 次に, 「足踏み」から「スクワット」の運動遷移パター ンを提示した場合, のように運動パターン間の遷 移パスが生じる.このようなパスの確率分布を外部か らの入力に応じて変化させることにより,環境に応じ た行動の生成が実現できる. おわりに 本研究ではエルゴディック を用いたミメシス モデルを提案した.局所的にモデルのパラメータを推 定することにより,複数の運動パターン状態が自己組 織的に配置された原始シンボルを発現し,観察データ の分節化を実現した.また,各状態間の遷移パスも自 動的に構築することを確認した. なお,本研究は,科学研究費補助金基盤研究 (研 究課題名:知能の力学的情報処理モデルの展開,研究 代表者:中村仁彦)の支援を受けた. 参考文献 .&/ 鮫島,片桐,銅谷,川人, 0モジュール競合による運動パ ターンのシンボル化と見まね学習0 電子情報通信学会論 文誌 123)454 6& 7*4&** '**' 8 % (+ (+ (+ (+ (+ (+ (+ ( + (rad) 2 1 Shoulder(HMM) Shoulder(Original) Elbow(HMM) Elbow(Original) 0 1 2 0 5 (sec) 9 # ) : .'/ 5, 0; 0 "4 < # = &77& .8/ 稲邑,中村,戸嶋,江崎, 0ミメシス理論に基づく見ま ね学習とシンボル創発の統合モデル0 日本ロボット学会 誌 1'' 6' ')>4'>8 '**9 .9/ 谷江,稲邑,中村, 0ミメシスの数学モデル:隠れマルコ .)/ .>/ フモデルを用いた階層的原始シンボル空間における運動 の認識と生成0 ロボティクス・メカトロニクス講演会?*8 講演論文集 '**8 @2A, 0匂いを識別する脳のカオス0 別冊日経 サイエンス 1&'* 9'4)& &77& 杉原,中村:0高機動性獲得に向けた運動制御実験のた めの小型ヒューマノイドロボットの開発0,第 '& 回 日 本ロボット学会学術講演会 'B'9 '**8
© Copyright 2025 Paperzz