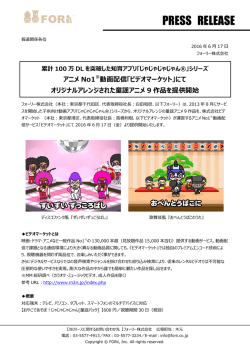
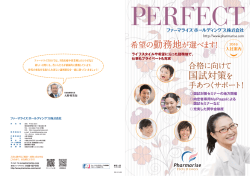
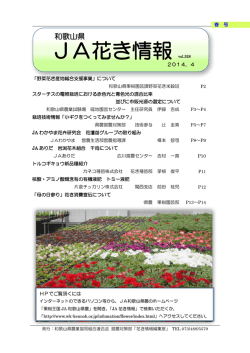
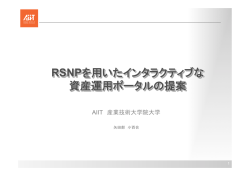
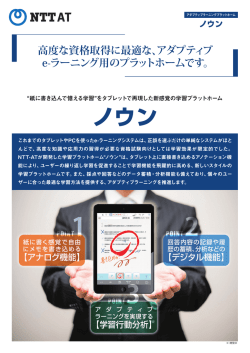
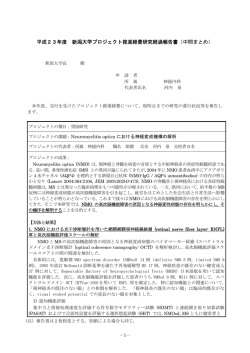
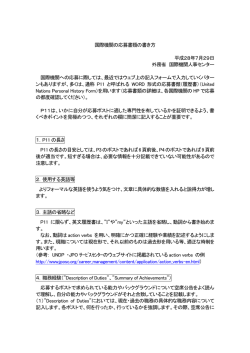
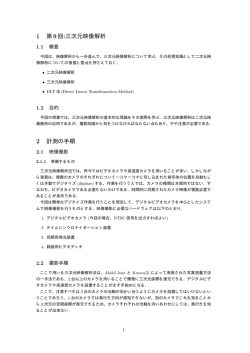
実写画像を用いた3D点群データ着色方式 宮岡伸一郎 東京工科大学 メディア学部メディア学科 〒192-0982 東京都八王子市片倉町 1404-1 Email: miyaoka@media.teu.ac.jp あらまし レーザーミラースキャナで取得した点群データに,実写画像を用いて着色を施す方法 を提案する.まず,人手で実写画像上の特徴点(たとえば建物のコーナーなど)と点群データの 特徴点の対応付けを行う.点群データの特徴点の視認を容易にするため,点群画像上でジャンプ エッジとルーフエッジを可視化する.対応付け結果に基づき点群から実写画像への透視投影を求 め,これを用いて点群の着色を行う.実用ツール化するため,着色範囲の指定機能,2次元射影 変換を用いた着色機能なども実装した.実験の結果,概ね実用に耐えうる精度・作業効率で着色 が行えることを確認した. Coloring Method for Point Cloud Data Based on Photographic Images Shinichiro MIYAOKA School of Media Science, Tokyo University of Technology Email: miyaoka@media.teu.ac.jp Abstract For coloring point cloud data acquired by a laser mirror scanner, we propose a coloring method using photographic images. Firstly feature points in a photographic image are corresponded to feature points of point cloud data manually. To make visual recognition easy, jump edges and roof edges are detected in a point cloud image. Based on this correspondence, the perspective projection from the point cloud data to the photographic image is computed by DLT(Direct Linear Transform). With the perspective projection, coloring for the point cloud data is carried out. As experimental results, the proposed method is confirmed to be effective in practical use. 1. はじめに レーザーミラースキャナは,数百メートルの 範囲に及ぶ広大な空間の3次元計測を可能と し,これまで主に,土木・建築関係の測量や遺 跡・文化財のアーカイブなどに用いられてきた. 遺跡・文化財のアーカイブに関する研究の例と しては,鎌倉の大仏を対象とした The Great Buddha Project1)がある.この研究では,距離 画像から自動で,対象物の 3 次元的幾何・光学 モデリングを行う方法を提案している. 一方,コンピュータビジョンの技術をコンテ ンツ制作に活用する研究も試みられている. Photo Tourism2)では,インターネットで取得 した大量の観光地画像からビジョン技術を用 いて3次元座標を復元し,この3D 座標データ (以下点群データ)を,大量画像をブラウジン グする際のインタフェースとして用いている. 本研究では,レーザーミラースキャナで取得 した高密度かつ正確な点群データをコンテン ツ制作に活用することを試みる.たとえば,広 大なキャンパス空間をウォークスルーできる 3D キャンパスマップの制作である.これを実 現するには,取得した点群データにメッシュ張 りを施し3DCG モデルを作成するアプローチ が一般的であるが,我々は点群の風合いを活か した点ベースのノンフォトリアリスティック (例えば3D 点描画風)なコンテンツ表現を目 指している. このときまず,取得した点群に実物に近い着 色を施す必要がある.レーザースキャナと同期 して稼動する特殊なカメラを利用する方法3) もあるが,設備コストがかかることと,点群取 1 得時の条件に依存した着色となり,季節・時 刻・天候など様々な条件変化に対応した着色が できずコンテンツ制作の際の自由度が少なく なるという難点がある.そこで,市販のデジタ ルカメラで撮影した画像を用いて点群データ に着色する方法をとることとした.この方法を 用いると,手間のかかる点群データの撮影を一 度だけ行っておけば,様々な条件で撮影した画 像を用いて着色することが可能となる.カラー 画像とレンジデータの位置合わせを行う方法 としては,カラー画像中のエッジとレーザー反 射強度画像中のエッジの関係を利用する方法 3) ,カラー画像から抽出したエッジを3次元 幾何モデルに投影し,そこでの幾何学的整合性 を利用する方法4)などが提案されている. 本論文では,簡易で実用的な点群着色ツール の開発を目的に,画像と点群の間の人手による 特徴点対応付けと,これから導かれる透視投影 を利用した点群着色方式を提案する.対応付け のための点群特徴点の可視化,透視投影パラメ ータの算出法,実際の着色プロセス,実験結果 について報告する. 2. 着色プロセスの概要 2.1 透視投影による点群着色 利用するレーザーミラースキャナはリーグ ル社製 LMS-Z210i である.レーザーの飛行時間 に基づき対象物までの距離を測定しこれから 3次元座標を求めるもので,測定可能範囲:4 ∼400m,測定精度:25mm の性能を持つ.0.12 度刻みのパノラマスキャンを行うと 200 万点 の点群データが取得できる.図 1 に建物の点群 データを二つの角度から可視化した例を示す. v= p5 X + p 6Y + p 7 Z + p8 p 9 X + p10 Y + p11 Z + 1 (2) ここで,式(1)に含まれる p1∼p11 のパラ メータが同定できれば,点群座標と実写画像座 標の対応付けが可能となり,各点に実写画像の 色を付与することできる.パラメータの数が 11 個なので,原理的には点群データと実写画 像の間で 6 組以上の特徴点対応付けができれ ば,後述する DLT(Direct Linear Transform) などの手法を用いて p1∼p11 を求めることがで きる.しかし実際には,対応付けの精度が及ぼ す影響,カメラのレンズ歪の影響,オクルージ ョンの影響などがあるので,着色精度について は実験的に検証していく必要がある. 2.2 特徴点の対応付けインタフェース 実写画像上の特徴点(例えば建物のコーナー など)は,視認により容易に指定できる.一方 対応する点群の特徴点については,3次元空間 上で直接指定できないため,適切な角度に透視 投影した画像上で指定する必要がある. 対応付けを,図2に示すようなインタフェー スで行う.点群を透視投影により画像化する際, 点密度の高い場合や遠景の点群が投影画像上 で近接して存在する場合,画像上の一つの画素 に複数の点が投影される.実写画像と対応付け する点は最前面(視点から最短距離)の点とす るのが妥当であるので,投影画像の画素配列と 同じサイズの点群 ID マップを用意し,投影の 際最前面の点の ID をここに記録する.投影画 像上でマウスにより特徴点を指定し,ID マッ プから画像座標に対応する点 ID を読み出し, 点の3D 座標を取得する.必要なだけ特徴点の 対応付けを行った後,透視投影のパラメータを 求め,式(1) , (2)を用いて点群着色を行う. 図 1 点群データ 3次元点群空間の座標(X,Y,Z)と実写画 像上の座標(u,v)の間には,座標系の平行 移動,回転,透視変換を含む以下の透視投影の 関係が近似的に成り立つ. u= p1 X + p 2 Y + p 3 Z + p 4 p 9 X + p10 Y + p11 Z + 1 (1) 図2 対応付けインタフェース 2 3. 特徴点の可視化 3.1 距離画像とジャンプエッジ 点群画像(点群データを透視投影した画像) 上で,特徴点を視認しやすいように可視化する 必要がある.まず一つの方法は,距離情報の利 用である.視点から各点までの距離を求め,近 いほど明るく遠いほど暗くなるように,距離に 応じて濃淡をつける.実際には,可視化範囲の 最近距離と最遠距離を指定しておき,距離に比 例して濃淡が変化するようにして画像化した. さらに建物の稜線や物体の輪郭などを明示 するため,ジャンプエッジを求める.ジャンプ エッジとは点群画像上の隣接点の間で距離に 隔たりがある部分であり以下のようにして求 めている.点群 ID マップを用い,点群画像上 の注目画素及び,横方向・縦方向の隣接画素に 投影された点の3次元座標を求める.注目点と 隣接点の3次元的な距離を計算し,これが閾値 以上のときジャンプエッジとして表示する.隣 接画素に点が存在しない場合は,隣接の範囲を 拡大して計算する. 図3に距離画像にジャンプエッジを重畳し たものを示す. 平面当てはめの方法は以下の通りである.点 群画像上で,点群 ID マップを用い注目画素の 近傍 n×n の範囲に存在する点の3次元座標を 取得する.3 個以上の点が存在する場合,次式 により平面当てはめを行う. ∑ (aX 2 i + bYi + cZ i − 1) → min . (3) i 平面当てはめの際の近傍のサイズ n×n は,3 D 点群空間における当てはめの範囲がほぼ等 しくなるように,視点と点群の距離に応じて定 めている. 平面当てはめの結果,正規化された法線ベク トル n は次式により求まる. (4) n = (a l , b l , c l ) T ここに l はベクトル(a,b,c)の長さである. 図5に視点方向から光を当て,ルーフエッジ を可視化した例を示す. 図5 ルーフエッジの可視化 図3 ジャンプエッジの可視化 3.2 ルーフエッジの可視化 ジャンプエッジの可視化により,建物と遠景 の境界,ジャンプエッジからなる稜線などは視 認しやすくなるが,図に示すような建物領域の 内部にある稜線,コーナーなどは視認が難しい. これらはルーフエッジと呼ばれる.そこで局所 的な平面当てはめを行い,法線ベクトルを算出 しこれを用いてルーフエッジの可視化を行う. 図5に示すように,対象物までの距離がある 程度以上であれば良好な結果が得られるが,対 象物までの距離が近くなるとノイズの影響を 受け安定した法線ベクトルが得られない.図6 (a)が良い結果が得られなかった例である. そこで,点群の奥行方向の成分に対し点群画像 上で最小値フィルタ処理を施しノイズ除去を 行った.フィルタのサイズは平面当てはめの時 と同じである.ノイズ除去後法線ベクトルを求 め,ルーフエッジを可視化したものを図6(b) に示す.図6(a)と比較して,より良好な可 視化が行われていることが分かる. ルーフ エッジ (a)改良前 図4 ルーフエッジ (b)改良後 図6 ルーフエッジ可視化の改良 3 4. 実写色マッピング 4.1 DLT によるキャリブレーション 実写画像上の指定点(ui,vi)と対応付けが なされた点群データ(Xi,Yi,Zi)から,DLT を用いて透視投影のパラメータ p1∼p11 を求め る. p = ( A T A ) −1 A T q (5) ここに, X 1 Y1 0 0 A = X 2 Y2 0 0 Z1 1 0 0 0 0 − u1 X 1 − u1Y1 − u1Z1 0 0 X 1 Y1 Z1 1 − v1 X 1 − v1Y1 − v1Z1 (6) Z 2 1 0 0 0 0 − u 2 X 2 − u 2Y2 − u 2 Z 2 0 0 X 2 Y2 Z 2 1 − v2 X 2 − v2Y2 − v2 Z 2 L u1 v 1 q = u 2 v 2 M (7) である. 特徴点を必要なだけ指定できない場合,直線 拘束を利用する.すなわち,透視投影では直線 は直線に変換される,という性質を利用するの である.たとえば道路の縁など,線としての対 応付けはできるが,線上の特徴点を対応付けし にくいといった状況で有効である.実写画像上 (u2,v2)により指 の線を二つの点(u1,v1), 定し,対応する点群空間の線もまた二つの点 (X2,Y2,Z2)で指定する. (X1, (X1,Y1,Z1), Y1,Z1),(X2,Y2,Z2)を透視投影したとき 得られる実写画像上の二つの点が,(u1,v1), (u2,v2)から定まる直線 (8) α u + β v =1 上にあるという条件を設定すれば,以下の拘束 条件が追加される. w = max(α , β ) (10) で式(9)を除した後,式(6), (7)に繰り 込む.求めたパラメータ p1∼p11 と式(2)か ら,各点に対応する実写画像上の点が求まり点 群の着色が可能となる. 4.2 点群着色ツール 実際の着色ツールには,これまで述べてきた 基本手法に加え以下のような機能を持たせて いる. (1)着色範囲の指定 隣接オブジェクトや重なって投影される遠 景・近景への誤着色を防ぐために,着色範囲を 指定する機能である.透視投影された点群画像 上での矩形領域指定,正射影された平面図上で の多角形領域指定,高さの範囲指定なの機能を 持たせた.これにより特定範囲,特定オブジェ クトのみ切り出し着色を行うことができる. (2)2 次元射影変換 地面や建物の壁面など,あきらかに平面形状 であることが分かっている場合,2 次元射影変 換を用いた方が簡単かつ安定に着色できる場 合がある.実写画像上で 4 点,点群画像上で対 応する 4 点を指定し,これらから 2 次元射影 変換を求める.求めた 2 次元射影変換により点 群と実写画像の対応付を行い,実写色をマッピ ングする. この方法によれば広範囲の地面を着色する 際,GoogleEarth の衛星画像を利用し簡単に ラフな着色を行うこともできる.衛星画像と点 群を正射影した平面図との間の 2 次元射影変 換を求め,これを用いて対応付け・着色を行う. 5. 実験と評価 5.1 着色精度 着色精度を検証するための実験を行った.対 象としたのは,東京工科大学のキャンパス内に ある,比較的複雑な形状をした建築物(図7: 片柳研究所棟)である. α X i p1 + α Yi p 2 + α Z i p 3 + α p 4 + β X i p 5 + β Yi p 6 + β Z i p 7 + β p 8 (9) − X i p 9 − Yi p10 − Z i p11 = 1 ここに,i =1,2 である. 式(9)を式(6), (7)に繰り込み直線拘 束まで考慮した DLT 計算を行う.この時,式 (9)をそのまま用いると,点拘束と直線拘束 の間の数値的なオーダーの違いにより直線拘 束がうまく機能しない.そこで点拘束と直線拘 束の強さを調整する重み係数 図7 実験対象の建築物と特徴点 4 DLT によるキャリブレーションでは,一般 的に指定した特徴点の数が多いほど高い精度 が得られると考えられる.一方,人手による対 応付けの負荷は,特徴点の数が少ないほど小さ い.実験では,特徴点の数を最小の 6 点(図7 の①∼⑥),さらに 11 点(同①∼⑪),16 点(① ∼⑯)の 3 ケースについて行った.これらを今 後,学習点と呼ぶことにする. 精度検証は,学習点とは別に設定した 9 個の 検証点(図7の A∼I)により行う.その手順 は以下の通りである.上記 3 ケースに関しキャ リブレーションを行い,透視投影を求める.求 めた透視投影で点群の検証点を実写画像上に 投影し,実写画像上で指定された検証点との距 離を求め誤差を評価する. 結果を表1に示す.学習点の数が 6,11,16 のそれぞれに対し,平均誤差は 3.90,3.45 , 2.85 であった.学習点の数を増やすと精度が 向上することが確認できたが,最小 6 点の指定 の場合でも平均 4 画素以下の精度が得られて いる. 表1 キャリブレーション精度 ケース1(6点) ケース2(11点) ケース3(16点) から遠い地面の部分で歪みが大きくなり,縞状 のパターンが発生している.これに対し図9の ケース3では,図8の左輪郭部の誤着色は消え, 地面の歪みも小さく抑えられていることが分 かる. 次に直線拘束の効果を検証する.対象とした のは図 10 に示す遠景の建物と広大な斜面から なる空間である.点群データは複数個所で撮影 した結果をマージして作成している. 学習点として①∼⑥を指定しキャリブレー ションを行った後,着色した結果を図 11 に示 す.学習点の近傍(遠景の建物の付近)ではほ ぼ正しく着色されているが,学習点から離れる につれ歪が大きくなっていることが分かる.芝 生領域が実際より狭い範囲に着色されている とともに,坂道の色が横方向にずれ芝生領域に 食い込んでいる. 平均誤差(画素) 最大誤差(画素) 3.90 5.55 3.45 5.89 2.85 4.09 求めた透視投影により,点群に着色した結果 を図8(ケース1),図9(ケース3)に示す. 図8のケース1では,棟の左輪郭部に空の色が 誤着色されているのが見られる.また,学習点 図 10 直線拘束の実験対象 図 11 直線拘束なし着色結果 図8 ケース1(6 点)着色結果 図9 ケース3(16 点)着色結果 図 12 直線拘束あり着色結果 5 学習点①∼⑥に加え,直線拘束⑦,⑧(破線 の部分)を追加した結果が図 12 である.直線 拘束が良く働き,全域にわたってほぼ正しく着 色されていることが確認できる.なお坂道の中 央部がほとんど空白となっているのは,レーザ ーミラースキャナの死角となり点群が撮影で きなかったためである. 5.2 着色結果と評価 約 300mの範囲に及ぶ東京工科大学キャン パスの点群データ(約 120 万点)を,本方式を 用いて着色した.点群データは 6 個所で撮影し たものをマージして作成している.着色に要し た作業時間は,画像の選択,作業のやり直しな ども含め約4時間程度であった.まだ NPR 的効 果は施していないが,リアルタイムでウォーク スルーできる点群ベースコンテンツを試作し ている.結果の一例を図 13 に示す.なお図 13 で,空と地面の一部(点群の密度が低い部分) については,透視投影して画像化した後,人為 的に点群を発生させそれらしい色を着色して いる. 図 13 キャンパスの着色結果の一例 最後に,4.2 で述べた着色範囲の指定や 2 次 元射影変換などの付加機能も用いて着色した 結果を図 14 に示す.銀杏並木のデータである が,建築物などに比べ,特徴点が指定しにくく, また木の幹の部分と地面・遠景などの間で誤着 色が発生しやすいケースである. 着色範囲の指定機能を用い,銀杏と地面を分 離したのち着色を行っている.銀杏並木部分に ついては幹の最下部や梢の先端部分を特徴点 として指定し,キャリブレーションの後着色し ている.地面については 2 次元射影変換を用い た.木の葉領域の一部に空の色が誤着色される などの問題もあるが,概ね良好な着色結果と考 える. 以上述べたように,提案した方式により実写 画像を利用してほぼ実用に耐えうる精度・作業 効率で,点群データの着色が行えることを確認 した. 図 14 銀杏並木の着色結果 6. おわりに レーザーミラーで取得した点群データに,実 写画像を用いて着色を施す方法を提案した. まず,人手で実写画像上の特徴点(たとえば 建物のコーナーなど)と点群データの特徴点の 対応付けを行う.点群データの特徴点の視認を 容易にするため,点群画像上でジャンプエッジ とルーフエッジを可視化する.対応付け結果に 基づき点群から実写画像への透視投影を求め, これを用いて点群の着色を行う.実用ツール化 するため,着色範囲の指定機能,2次元射影変 換を用いた着色機能なども実装した. 実験の結果,概ね実用に耐えうる精度・作業 効率で着色が行えることを確認した.今後は, 着色した点群データに基づく NPR(たとえば 点描画風)コンテンツ制作手法の開発を行って いく予定である. 参考文献 1)池内,倉爪,西野,佐川,大石,高瀬: The Great Buddha Project−大規模文化遺産 のデジタルコンテンツ化−,日本バーチャルリ アリティ学会論文誌,Vol.7,No.1,pp.103-113 (2002) 2)N. Snavely, S. M. Seitz and R. Szeliski: Photo Tourism: Exploring Photo Collections in 3D, SIGGRAPH 2006, pp.835-846 3)浅井,神原,横矢:全方位距離画像と全方 位カラー画像の統合による屋外環境の三次元 モデル化,画像電子学会誌,Vol. 34, No. 5, pp.529-538(2005) 4)倉爪,西野,M.D. Wheler,池内:リフレ クタンスと濃淡エッジを用いたテクスチャの アラインメント,電子情報通信学会論文誌 DⅡ,Vol.J85-D-Ⅱ,No.6,pp.1038-1046(2002) 5)椛島,原,倉爪,岩下,長谷川:幾何学的 整合性に基づくレンジデータとカラー画像の 位置合わせ,情報処理学会研究報告, 2006-CVIM-153-5,pp. 25-32(2006) 6
© Copyright 2025 Paperzz