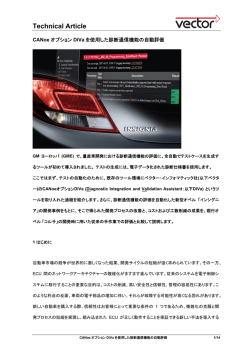
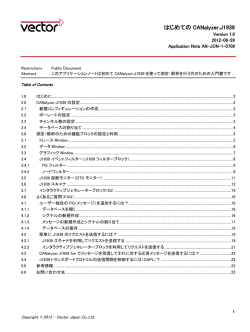
Technical Article 堅牢なCANシステムのためのテスト戦略 ∼ 航空分野における CAN アプリケーションの開発、 トラブルシューティング、保守 ∼ CANシリアルバスシステムは、すでに数多くの航空関連アプリケーションに実装されています。航空機に関するさまざ まな規格をまとめているARINCがCANを用いたARINC 825やARINC 812などに積極的に取り組んでいることは、航 空機メーカー、サプライヤー、航空会社が今後の機体計画でCANシステムへの依存度を高めていることを示していま す。堅牢性、信頼性、耐用年数の長さといった厳しい要求に応えるため、CAN通信の物理層もカバーした、効率的な測 定とテストの方法がますます求められています。 CAN (Controller Area Network) バスは本来、自動車用に開発 題と耐用年数の長さを考慮すれば、見込まれる経年劣化に対抗で されたものです。しかし、その堅牢性、信頼性の高い時間精度、 きるよう、電気的に十分な余裕を持たせた設計とネットワーク配置 良好な費用対効果といった特性から、それ以外の多様な分野やア が必要になります。ただし、その新しいシステムが論理的な機能テ プリケーションにも急速に実装されるようになりました。航空分野 ストに合格しただけでは、物理的な通信での品質や堅牢性につい には、ケーブルの長さ、過酷な環境条件 (高温、低温、湿度など)、 ては分かりません。そうした情報は、CAN物理層のテストと測定か 被雷に対する厳格な要求、耐用年数の長さなど、堅牢なCAN通信 らしか得られないのです。 が解決すべき課題が多数存在します。SAE J1939で商用車のバス 長がせいぜい40mであるのに対し、エアバスA380などの大型旅 客機ではバスケーブルが80mを超える場合もあります。さらに、 最低30年という機体の耐用年数の長さも課題となります。電気設 アプリケーションに大きく依存するCAN物理層 民間航空機に推奨されているCANプロトコルは、ARINC 825で 備は電気的なパラメーターが徐々に劣化していくのが普通です。 標準化されています。もともとBoschが策定したCAN 2.0A/B標準 特にプラグイン接続の箇所には、腐食や摩耗による老朽化の影響 でも、拘束力のある定義を持つのはISO/OSIレイヤーモデルの第 が短期間のうちに顕在化します。 2層 (データリンク層) のタスクのみで、現場で実際に使われる物 CANは現在、航空機の環境制御、ドア、ギャレー、煙感知、飲料 理的なパラメーターは、それぞれのシステム開発者とその特定の 水、除氷などのシステムに使用されています。航空分野固有の問 条件に大きく依存します。このことと深く関係するのがバス長と伝 October 2014 1 Technical Article 送レートです。これらは信号の伝搬に相互に関係があり、バスケー ます。航空機内のCANネットワークでは、バスケーブルの長さが ブルが長いほど、信号の伝搬遅延も大きくなります。ARINC 825は 80mに達することから、信号の伝搬遅延が及ぼす影響はさらに大 83.333kbps、125kbps、250kbps、500kbps、1000kbpsの伝送レー トに対応しています。高速CANバスはツイストペアケーブルを使用 し、0Vから2Vの作動電圧で動作します。バスケーブルはライン型の きくなります。ケーブルが長いほどビットの位置も分散するため、 すべてのバスノードにとって堅牢なサンプリングポイントを探すの は難しくなります。これには使用する伝送レートを下げることで対 トポロジーで実装され、終端抵抗を両端に置いた終端処理が必要 応できますが、別の実行可能な手段として、システムを2つの独立 になります。バスノードの接続にはショートスタブを使用します。 した高速ネットワークに分ける方法もあります。個々のノードのネッ CANバスでは、それぞれの送信ノードが、1つまたは複数の受信 トワークスタブも、反射などの波及的影響の原因となる場合があ ノードからのビット同期されたアクノリッジを待つことになっており、 ります。これらはケーブルの終端や、分岐部やプラグイン接続など これがCANの高い堅牢性を実現する理由の1つとなっています。こ の変換点で発生し、それによってCANバス信号に干渉波が重なり のような即時性のあるバスアクセスは、High/Lowの信号状態の同 ます。だいたいの目安としては、スタブの合計が総ケーブル長の 期 (ビット同期) にも基づいています。バスドライバーはすべてオー 10%を超えないようにする必要があります。最後に、高出力の電 プンコレクター出力を装備しており、プルアップ抵抗で生成されて 動モーターや変換器などの電磁干渉の発生源付近にバスケーブル いたHighの信号が、スイッチを通過した低抵抗の出力によってLow を敷設する場合は、EMC (Electromagnetic Compatibility) の問 の状態に移行するため、この出力が常に優先されます。したがって、 題を常に考慮しなければなりません。 常にLowがドミナント、Highがリセッシブとして扱われます。 CAN物理層エラーの一般的な原因 CAN物理層および論理層の同期解析 堅牢なCANネットワークを開発し、潜在的な通信エラーを未然 CANビットはそれぞれ複数のフェーズに細分化され、開発者が に検知するには、CANの物理層と論理層の両方を同時に解析する それらに共通するサンプリングポイントを指定します。これはバス ことが必要になります。開発者は物理層上の信号変化をビット精 ノードにとってのいわば「共通項」です。CANネットワークの物理層 度で把握する必要があります。その一方で、論理的なCANのイベ での問題は、オシレーターの公差や、トランシーバー遅延/配線遅 ントを考慮しない場合、設定、解釈、評価のどの面においても測 延によるビットの非対称が原因のフェーズエラーによって生じるこ 定が難しくなります。そのためベクターは、CAN用のテスト/解析 とが少なくありません。物理層を構成するコンポーネントの仕様 ツールであるCANoeとCANalyzerに高機能のオシロスコープ機能 によっては、これらの遅延によってサンプリングが可能な時間が前 を追加しました。これは「SCOPE」 というオプションで、オシロスコー 後に多少ずれる場合があります。通常、ビットのタイミングは航空 プデータとCANイベントデータに共通の時間ベースを使用するこ 機メーカーがCANネットワークの物理仕様の中で指定します。した とにより、記録したCANフレームとそれに対応するCANバス信号と がって、CANコントローラーごとに各バスノードのためのビットタイ を完全に同期して表示することができます。CANoe/CANalyzer. ミングが正しく設定されているかをチェックする必要があります。 SCOPEでは、4チャンネルまたは2チャンネルを装備したUSB接続 のオシロスコープハードウェア (図1) を使い、それぞれ帯域幅は 200MHzと60MHz、サンプリングレートはいずれも最大500MS/秒 になります。オシロスコープハードウェアとCANバスインターフェ イス間をsyncケーブルで接続することにより、正確な時間同期が 物理層のエラーは、バスケーブルが長すぎる場合や、スタブが 多すぎる/長すぎる場合、あるいは終端処理の誤りなどでも発生し 実現できます。 CANoe/CANalyzer. SCOPEには物理層の問題を迅速に特定す るための、多彩なトリガー条件が用意されています。トリガーのタ イプには、個々のCANフレームやID領域全体に加えて、エラーフ レームなどの特殊なイベントを設定できます。プログラムによるト リガー設定を組み合わせることにより、さらに複雑なトリガー条件 を定義することもできます。また、ユーザーは縦軸を電圧、横軸を 時間としたビットマスクを任意定義して適用することにより、ビット タイミングの違反を明確に視覚化できます。CAN信号の電圧レベ ルがそのビットマスクを通過した場合、それは、物理仕様やシステ 図1:CAN通信でのビット精度の解析を可能にするUSB接続 オシロスコープハードウェア October 2014 ムの許容範囲に問題があることを示唆しています。CANoe.SCOPE では、違反のあったビットマスクは赤で、正常なマスクは緑で表示 されます (図2)。 2 Technical Article 図2:ビットマスクを用いてCAN差分信号をテストし、サンプリングポイント領域でのCANノードの信号品質(データフィールド) 評価を実施 トラブルシューティングと堅牢性実現のための 効率的なテスト戦略 ラー原因になると考えることができます。エラーを文書化したテス トレポートやエクスポートしたデータは、航空機メーカーとサプラ イヤーの間で簡単に交換できます (図3)。サプライヤーも同じ解 このようなオシロスコープ解析機能により、開発者やテスト技術 者は、迅速で的を絞ったCAN物理層の解析を行えるようになりま 析/テストツールを使用して、簡単にエラーを発見し、排除できれ ば理想的です。 す。テストの実施方法として、まずすべてのECUを個別にテストし、 ほかにも、一般的なテスト実施方法として、人為的に物理的/論 考えられる問題の芽をあらかじめ排除しておくことを推奨します。 理的なエラーを発生させてCANネットワークにストレスを加える 確認されたエラーについては、その場所を以後のステップで絞り テストもあります。CANstressDRハードウェアモジュールは、この 込み、それを除去する対策を講じます。散発的に発生するエラー ユースケースに適したソリューションの1つです (図4)。ベクター については、同一のフレームやIDに対して耐久試験を行うのが有 はCANの先駆者として、自動車、商用車、農業機械、航空、船舶の 効です。ネットワークが問題なく動作している場合でも、それがか 各セクターで25年の実績を積み重ねてきました。ベクターのハー ろうじて正常に機能しているのか、あるいはシステムに十分な許容 ドウェアおよびソフトウェアソリューションを知っていただくため、 範囲が確保されているのかを確認したい場合があります。これは、 ベクターではCANシステムに加えてCAN FD、AFDX®、Ethernet 違反基準を厳格化することにより判断できます。最初に生じたエ など、他のネットワークの設計、解析、テストなどに関する豊富な ラーが再発するまで段階的にビットマスクの位置と形状を変えて トレーニングコースをご用意しております。また、無料のeラーニ いきます。このエラーの原因となる違反を起こしたECUが、おそら ングモジュール「CAN入門 (CAN FDを含む)」で、CAN通信テクノロ く通常のオペレーションで最初に故障するECUであり、潜在的なエ ジーの基礎を学ぶこともできます。 図3:自動テスト中に詳細なテストレポートを作成 October 2014 3 Technical Article まとめと展望 航空機の現行機種および今後の機種には数百にのぼるCANシス テムが搭載されるため、メーカーとサプライヤーはともに、高機能 な解析/テストツールの使用への依存度を高めています。先述のオ シロスコープソリューションを使用して、CANバス上の論理的およ び物理的なイベントを、ビット単位の精度でかつ時刻同期しながら 解析することで、初期のトラブルシューティングをスピードアップで きるだけでなく、信号品質や堅牢性の評価も可能となります。開発 者は、トリガーやプログラミングに関する多彩なオプションを高性 能のテスト自動化機能と組み合わせ、CANネットワークのトラブル シューティングや最適化に利用することができます。 航空産業のさまざまなメーカーや開発部門では、ベクターの SCOPEソリューションをベースとした製品も力を発揮します。ベク ターでは、オシロスコープハードウェアと適切なCANインターフェ イスを1つの筐体にまとめた製品を開発する予定です。また、テス トソリューションをできるだけ効率的に、幅広く使用していただくた 提供元: 見出し画像および図 1 ∼ 4:Vector Informatik GmbH リンク: ベクターのアビオニクスネットワークのための開発支援ツール http://avionics-networking.com/av_index_jp.html CANoe www.vector-japan.co.jp/canoe CANoe/CANalyzerオプションSCOPE http://jp.vector.com/vj_canoe_canalyzer_scope_jp.html CANstressDおよびCANstressDR www.vector-japan.co.jp/canstress GL1020FTE(英語版サイト) www.vector.com/gl1020fte ベクターのeラーニングに関する詳細 http://www.vector-elearning.com/vl_index_jp.html め、ベクターでは特殊な信号解析機能やメーカー固有のユーザー ベクター・ジャパン インターフェイスといった、お客様固有の要望にもお応えすること www.vector-japan.co.jp が可能です。これによって、航空機メーカーの仕様に準拠したルー チンのプロダクションテストを個々の機体に速やかに実行できる自 動テストツールが構築できます。また、ベクターは、革新的な測定 機能や、CANケーブルとその終端処理をチェックする解析機能を装 備して、オシロスコープソリューションをさらに拡張することも計画 しています。一般的に、航空機内のCANケーブルは非常に長く、ア クセスも困難です。そのため、 トラブルシューティングに掛かるコス トを削減するには、ケーブルのどこに障害や損傷が生じたのかをピ 執筆者: Jörn Haase (Dipl.-Ing.) ハンブルク (ドイツ) にあるVector Informatik(ベクター本社)の航空部門にて、 航空担当のグローバルテクニカルエン ジニアとして勤務。 ンポイントで特定できるようになることが目標となります。 本稿はドイツで発行されたAerospace Testing International, Showcase 2015に掲載されたベクター執筆による記事を和訳したも のです。 Gavin C. Rogers (B.Eng. M.Sc.) シュツットガルト (ドイツ) のベクター本社 で、プロダクトマネージャーとして CAN および CANoe/CANalyzer オプション SCOPEを担当。 ■ 本件に関するお問い合わせ先 図4:CANstressDRとCANoeを使用することで、CANバスや その物理的属性、ロジックの状態を対象に、再現可能な妨 害を発生させることが可能 October 2014 ベクター・ジャパン株式会社 営業部 (東京) TEL:03-5769-6980 FAX:03-5769-6975 (名古屋)TEL:052-238-5020 FAX:052-238-5077 E-Mail:sales@jp.vector.com 4
© Copyright 2025 Paperzz