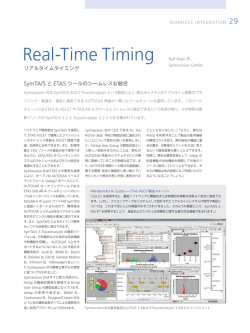
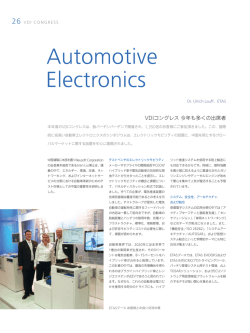
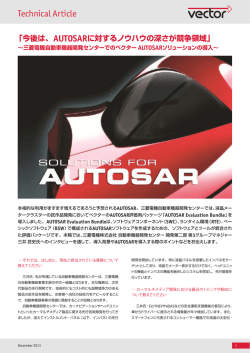
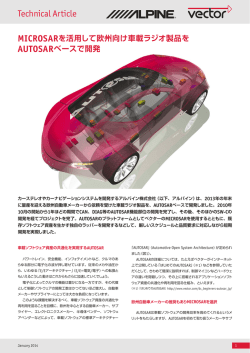
Technical Article AUTOSAR 、Ethernet を取り入れる Ethernetは新しいようで古くからある、なじみ深いネットワーク技術で、現在も車両への採用が進んでいます。登場した 当初は、診断アプリケーションと電気自動車のインテリジェント充電にしか使用されていませんでしたが、最近ではオン ボードEthernetネットワークも実装されるようになりました。本稿では、Ethernet の特性と特長について述べ、この 技術をAUTOSARに組み込む際の特殊性について考察します。最後に、新しいアプリケーションの実装に使用でき る、AUTOSAR Ethernetスタック向けの便利な機能拡張を紹介します。 ほんの数年前まで、車両で使用されるバスシステムといえばCAN 車両内でEthernetを使用する基盤を確立したのです。ほどなく話 とLINしかありませんでしたが、帯域幅の拡大と安全分野、特に 題の中心となったのが E-モビリティーで、そこでEthernetベース X-by-wireシステムに関する要求の高まりに伴い、FlexRayが開 のV2Gアプリケーションが脚光を浴びるようになりました。電気自 発、導入されました。また、マルチメディア分野のハイエンドアプ 動車やハイブリッド自動車は充電の過程で電力会社の充電スポッ リケーションを対象とするMOST規格も策定されました。CANとは トと通信します。この通信はTCP/IPv6と、専用のSmart Charge 違い、FlexRayやMOSTは複雑で高価なバスシステムです。これ らのバスシステムに対応できるサービス工場が足りないこともあ Communication (SCC) プロトコルに基づいて行われ、充電の種 類 (AC/DC)、充電の日付と時刻、充電の長さ、単価および支払い り、CANは引き続き車両診断の外部アクセスに使用されていまし 情報といった情報が交換されます。 たが、CANの帯域幅が限られているうえに、ソフトウェアコンテン 標準のシールド付きEthernetケーブルは配線コストが高いた ツの量も増加したため、CANでのECUの書き替えには非常に時間 め、Ethernet技術の車内ネットワークへの利用は進みませんでし がかかるようになりました。これを解決するために数年前に開発さ たが、新しい物理層のBroadR-Reachの登場で、Ethernetも車内 れたのが、DoIP (Diagnostics over Internet Protocol) です。こ 通信の選択肢に数えられるようになりました。BroadR-Reachで れは車両環境のネットワーク技術にEthernetを用いた初めての は、ツイステッドペアケーブルを使用することで、CANの100倍の プロトコルで、ISO 13400として標準化されています。Ethernet スピードに相当する100 MBit/sの帯域幅を、配線コストを上げる はその帯域幅の広さを武器に、主にオフィスやインターネットの世 ことなく実現できます。また、スイッチドネットワークが利用できる 界に普及しています。DoIPベースの診断テスターは、サービス工場 メリットもあり、これによってバックボーン型アーキテクチャーの実 の既存のネットワークに簡単に組み込むことができます。DoIPは 装なども可能になります (図1)。現在、自動車メーカーとそのサプ October 2013 1 Technical Article ライヤーは、この他にAVB (Audio Video Bridging)、ネットワー は生データをTCP/IPスタックにルーティングしたり、それからデー ク管理といったアプリケーションや、新しいゲートウェイECUのコン タを受信したりします。IP、UDP、TCPのプロトコルはそれぞれTCP/ セプトなどに関心を寄せています。 IPスタックで処理されます。ただし、これはAUTOSAR 4.0では完全 には仕様化されていません。ここでは、一般的な既成のTCP/IPス Ethernet を IP (Internet Protocol)、TCP (Transmission Control Protocol)、UDP (User Datagram Protocol) と組み合 タックの使用が推奨されています。 わせると、通信スキーマをデータ指向からサービス指向に移行 TCP/IPプロトコルファミリーの基本的なパラダイムは、ソケット させることができます。BMWはシリアル化プロトコルのSOME/IP の使用にあります。ソケットはリモート/ローカルのエンドノードの (Service Oriented Middleware over Internet Protocol) を開発 IPアドレスとポートの組み合わせで一意に特定されます。ソケッ しました。これにはリモートプロシージャーコールに使用できるとい トを介することで、パケット指向のUDPのユーザーデータとコネ う大きな特徴があり、同じく仕様化されたSD (Service Discovery) クション指向のTCPのユーザーデータが、TCP/IPスタックとアプ プ ロトコ ル との 併 用 で 効 果 が 発 揮 さ れ ま す。ECUはService リケーションの間を双方向にルーティングされます。このパラダ Discoveryを使用してサービスのアベイラビリティーを通信相手に伝 イムはAUTOSARのPDUのコンセプトとは両立しません。ソケット えるほか、サービスの検索やイベントの登録を行うこともできます。 ベースからPDU ベース、あるいはその逆方向に通信を変換する EthernetとAUTOSAR よって、見慣れたPDU から上位レベルモジュールへのインター のはSocket Adaptor (SoAd) モジュールの役目です。これに Ethernetはバージョン4からAUTOSAR仕様に含まれるようにな りました。AUTOSARのアーキテクチャーでは、Ethernetの通信ス タックはCAN、LIN、FlexRayなどのスタックと同列に配置されてい ます。ただし、それらとは違って、Ethernetスタックには上位のプ ロトコル層、すなわちIP、UDP、TCPと関連する、他にはない特徴 が多数存在します。Ethernet Transceiver Driver (EthTrcv) および Ethernet Driver (Eth) モジュールは、他のネットワーク技術のそ れぞれのドライバーに相当するモジュールです。一方、Ethernet Interface (EthIf) モジュールは違います。CAN、LIN、FlexRay用 のインターフェイスはAUTOSARのPDU (Protocol Data Unit) イン ターフェイスを直接実装するのに対し、Ethernetインターフェイス フェイスが提供され、Ethernetスタックが AUTOSARアーキテク チャーに完全に統合されます。 AUTOSAR 4.0で仕様化されたEthernetスタックにより、Ethernet 上でPDUを送受信するための基盤が確立されました。ここではさ らに、DoIPのユースケースも考慮されており、DoIPプロトコルの実 装は、Socket Adaptorプラグインの形で実現されます。加えて、こ のバージョンのAUTOSARはXCP over Ethernet経由でのECUキャ リブレーションとUDP経由でのネットワーク管理をサポートするほ か、AUTOSAR Complex Driver (Cdd) を接続するためのインター フェイスを提供します。Ethernetスタックでのデータの自動パラ メーター化は、AUTOSAR 4.0では一部しかサポートされていませ ん。Ethernetネットワーク、フレーム、PDUは、AUTOSAR System 図1:Ethernetネットワー クを装備した将来の自動 車で考えられるドメイン アーキテクチャー October 2013 2 Technical Article Descriptionか、ECU Extract of System Descriptionで表すこと ができます。上位プロトコル層のデータの事前設定、たとえばIPア SOME/IPプロトコルとそのユースケースであるSCCとAVBはま だAUTOSAR入りしていませんが、SOME/IPの実装サンプルの記 ドレスやポートの定義は仕様化されていません。 述が、現在の標準の補足資料として提供されています。 AUTOSAR 4.1におけるEthernetの拡張サポート 形式として使用されているのはFIBEX 4.1のみです。FIBEX 4.1 これまでのところ、実際に車載 Ethernetネットワーク用の記述 にはAUTOSAR 4.1.1に合わせた調整が施されています。つま 車載Ethernetネットワークの導入に伴い、AUTOSAR 4.0の り、この2つの記述形式は同一ではないものの、その内容は情報 Ethernetスタックでは対応できない要求が新たに出現するように を損なうことなく一方から他方に変換できるのです。これによっ なりました。たとえば、複数のPDUの効率的な送信を実現するこ て、AUTOSAR 4.1.1に準拠したEthernetスタックのデータの自 とは非常に困難です。そのため、AUTOSAR 4.1.1ではEthernet 動パラメーター化が、かなりの範囲で可能になります (図2)。 スタックの大々的な見直しが行われました。 > TCP/IPスタックは現在ではAUTOSARモジュールの1つと なっています > IPバージョン4だけでなく、バージョン6もサポートされ ています。これら2つのバージョンのIPは、1つのECU内 で個別に使用することも、また併用することも可能です > VLAN (仮想LAN) も使用可能となりました > Socket Adaptorを経由すれば、PDUベースのデータ伝送は はるかに効率化します > 新バージョンのSocket Adaptorでは、上位レベルのモ ジュールへの汎用のインターフェイスが提供されます > DoIPプロトコルの実装はSocket Adaptorから除かれ、 独立したDoIPモジュールに移されました > Service Discoveryプロトコルも新しいAUTOSARモ ジュールとして仕様化されています 実地に基づく便利な補足機能 すでに述べたように、Ethernetスタックのアプリケーションの 中には、Smart Charge Communicationのように、AUTOSAR仕 様に含まれていないものがあります。これをカバーするのがISO およびDINの両規格で、ベクターはその策定に携わりました。こ れらの規格で仕様化されたインテリジェント充電用のプロトコル は、電気/ハイブリッド自動車のメーカーやサプライヤーにとって 必要なものです。それらのプロトコルをシームレスにAUTOSARの Ethernetスタックと統合できれば理想的です。 仕 様 上、XCP (Universal Measurement and Calibration Protocol) にはルーティング機能がありません。車両アクセスに Ethernetを使用する場合は、それと併せて、Ethernetネットワー クに直接接続されていないECUもすべて、XCPでキャリブレーショ ンすることが必要になります。ベクターはドイツの自動車メーカー と協力し、このための仕組みを開発しました。 ゲートウェイ経由のサブEthernetネットワークへのDoIPのルー ティングは、ISO 13400仕様では標準化されていません。しかしな がら、自動車メーカー各社との協力により、ソリューションによるア プローチがすでに完成しています。 AUTOSARで 定 義 さ れ て い るEthernetス タ ッ ク と し て、 MICROSAR IPという名前のECUソフトウェアがベクターから提供さ れています (図3)。これにはAUTOSAR 4.0.3および4.1.1で仕様 化されている機能が含まれているうえ、AUTOSAR 3.xのプロジェ クトにも使用できます。上記の機能拡張だけでなく、リソースが最 小限で済むSOME/IPの実装も含まれています。MICROSAR IPの アーキテクチャーがあれば、顧客独自の機能拡張を問題なく実装 できます。 展望 図2:EthernetスタックはAUTOSAR 4.1の記述ファイルで 設定されます October 2013 AVBには、オーディオとビデオのストリームを時間同期させ、 Ethernet上を伝送できるようにする機能があります。これに必要な IEEE 1722 Transport Protocolは、すでにベクターから提供されて います。AVBのサポートは拡張が進められており、汎用のPrecision Time Protocolによる時間同期の統合などが行われています。 3 Technical Article 図3:ベクターが提供するAUTOSAR Ethernetスタック、MICROSAR IPには、AUTOSARモジュールと便利な補足機能が含まれています AUTOSARバージョン4.2.1では、Ethernetスタックに関連した 何らかの拡張が加えられる見込みです。その一環として、SOME/IP によるデータのシリアル化を標準に採用する取り組みが現在進め られています。また、送受信者間通信のためのデータのシリアル 化のサポートも、これらの計画に含まれています。現在では、これ 執筆者: Marc Weber (M.Eng.) Vector Informatik GmbHの組込ソフトウェ アプロダクトラインでEthernetスタックの プロダクトマネージメントを担当。 はサーバー/クライアント間の接続でのみ可能です。シリアル化し たデータの効率的な送受信に特化して開発された、次なる通信モ ジュールの導入については、他の文書で説明されています。現在 はその他に、異なるネットワーク間でのIPアドレスの割り当てと、グ ローバルな時間同期に関するコンセプトが検討されています。 本稿は2013年10月にドイツで発行されたHanser automotiveに掲載 されたベクター執筆による記事を和訳したものです。 提供元: ■ 本件に関するお問い合わせ先 見出し画像および図1 ∼ 3:Vector Informatik GmbH ベクター・ジャパン株式会社 営業部(組込ソフトウェア関連製品) リンク: ベクター・ジャパン www.vector-japan.co.jp October 2013 TEL: 03-5769-7808 E-Mail: EmbeddedSales@jp.vector.com 営業部 (東京) TEL:03-5769-6980 FAX:03-5769-6975 (名古屋)TEL:052-238-5020 FAX:052-238-5077 E-Mail:sales@jp.vector.com 4
© Copyright 2025 Paperzz