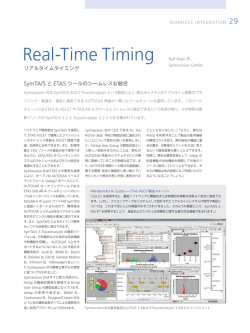
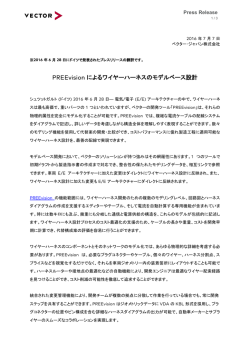
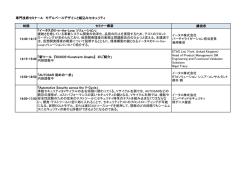
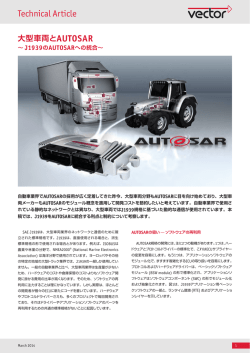
AUTOSAR がもたらす新たなチャンス 2009年以降、大型車両へのAUTOSARの採用は徐々に広がっており、一部のトラックの量産モデルのシリーズにすで に使用されています。現在は農業機械への導入が進められているところですが、AUTOSARのいくつかの点を拡張す れば、大きな成果が期待できます。 トラックメーカーがAUTOSARを実装して以来、近年では農業 機械や建築機械のメーカーもAUTOSARに関心を寄せるようにな ための最適化を行う好機です。このようにAUTOSARのメソドロ ジーは、イノベーションへの重要な推進因子であると言えます。 りました。この分野では自動車やトラックの業界よりも車両の多品種 少量生産の傾向が高く、新型車両での電子部品の増加に伴うコスト AUTOSARのアーキテクチャー 上昇の問題は特に深刻です。農業機械や建設機械のメーカーが競 争力を維持するには、ECU全体、そしてソフトウェアに実装されてい AUTOSAR仕様が策定されるに至った主な動機は2つあります。 る個々の機能を可能な限り再利用することが極めて重要です。まさ その最初の目標はハードウェアとプロトコルのドライバー標準化で、 にその要件を満たすべく策定されたのがAUTOSARで、AUTOSAR これはベーシックソフトウェアモジュール(BSWモジュール)を仕様化 はこの分野における当然の選択肢となっています。 することで実現されました。ベーシックソフトウェアのメリットの1つは AUTOSARのコンセプトが持つ優位性 ドウェアの交換が容易になるというメリットもあります。 標準ソフトウェアの使用によるコストの節減です。もう1つ、ECUハー AUTOSARの次なる目標は、 複雑な機能を管理しやすい単位に細 AUTOSARのソフトウェアコンポーネントモデルは、個々の機 分化することでした。 これはVirtual Functional Bus (VFB) と呼ばれる 能の再利用を促します。また、ECU全体を再利用するための高度 抽象化されたチャンネルと、 それを介して通信するソフトウェアコンポ なバリアント操作方法に加え、再設定 (ポストビルド) の手段もオ ーネント(SWC)を実装することで実現されました。実際の通信関係 プションとして用意されています。ただし、その最大の優位性が は、 ECUへのソフトウェアコンポーネントの割付によって決まります。 発揮されるのは、AUTOSARのメソドロジーを体系的に使用して 全体的な通信は実行時にRTE(ランタイム環境)によって実装され、 こそです。このメソドロジーへの開発プロセスの切替は、ECU全 外部との通信が必要な場合は、 このRTEがベーシックソフトウェアに 体のアーキテクチャーを見直し、その全コンポーネント、すなわち アクセスします。図1はJ1939アプリケーションに関係するベーシックソフ ハードウェアとソフトウェアの両方をモジュール化して使用する トウェアの一部と、 RTEおよびアプリケーションレイヤーのSWCです。 01 Technical Article / November 2015 大型車両でのAUTOSARの使用 AUTOSARベースのEEアーキテクチャーを持つ最初のトラック が世に出てから、もはや数年が経過しました。業界の他の分野で製 造されているディーゼルエンジン用エンジンコントローラーなどの 個々のECUも、すでにこの標準規格に準拠しています。先行する 農業機械メーカーはAUTOSARに合わせたプロセスの変更を進め ており、 最初の試作ECUが開発されています。AUTOSARのメソドロ ジーに体系的に移行することで、 実装効率が大幅に向上しています。 大型車両業界でのAUTOSARの使用は、J1939プロトコルが ベーシックソフトウェアに段階的に組み込まれたことで可能となっ ています(図2)。2009年、AUTOSAR 4.0.1でJ1939トランスポート レイヤー(J1939Tp)が仕様化され、この取り組みへの足場が築か れました。4年後のAUTOSAR 4.1.1ではメタデータが導入され、 ベーシックソフトウェアの上位レイヤーから、CAN ID内のアドレス 情報へのアクセスが可能になりました。この点はJ1939にとって重 要です。メタデータにより、 メッセージをその送信元を問わずに処理 またはルーティングできるようになります。これは、 リクエストに正し く応答するためには欠かせません。このタスクを実行するBSWモジ ュールとして、J1939 Request Manager(J1939Rm)が導入された ほか、 アドレス調停を行うJ1939 Network Management (J1939Nm) と、J1939診断を処理するJ1939 Diagnostic Communication 図1: Manager (J1939Dcm) が、拡張版のDiagnostic Event Manager 農業機械用に拡張されたAUTOSARアーキテクチャーの抜粋 (DEM)とともに追加されました。 完全に動的なアドレス割り当ては農業機械や建設機械で広く 使用されており、ISOBUS上での通信の前提条件といえますが、 現在、AUTOSARはその壁に直面しています(図3)。また、プロプ AUTOSARのソフトウェアコンポーネントモデル ライエタリメッセージ (PropA、PropA2、PropB) での複数のマ ルチプレクサや、NMEA2000®およびISO 11783のトランスポー AUTOSARのソフトウェアコンポーネント (SWC) はコンポジ トプロトコルを処理する機能の改善も必要です。さらに、バーチャ ションの階層に組み込まれています。SWCの機能はランナブルに ルターミナルやタスクコントローラーといったISO 11783のコンポー よって実装されます。SWCの通信の要件は、オペレーションや転 ネントであるプロトコルにもまだ対応していません。 送するデータエレメントがグループ化されたインターフェイス、す なわちポートによって定義されます。VFBはこれらのポートを抽 これからのAUTOSARの開発 象化レベルで結合します。ECUへのソフトウェアコンポーネントの 割付が済むと、VFBの抽象的なシグナルがネットワークシグナ 今日ではすでに、完全に動的なアドレス割り当てやISO 11783の ル、PDU、フレームなどに具体的にマッピングされ、最終的に物理 Extended Transport Protocol、 さらにはプロプライエタリメッ 的なネットワークに割り当てられます。 セージの処理に対応したソリューションが用意されており、それらで 図2: AUTOSARにおけるJ1939のマイルストーン 02 Technical Article / November 2015 ISO 11783/ISOBUSの主な特性 ISO 11783は、任意のトラクターと任意のインプリメントを ISOBUSを介して一 体 化するとともに、 「 精 密 農 業 」などの 新 しい農業技術の新規開発を促進することを目標に策定されま した。これは完全な動的アドレス指定に対応する、SAE J1939 を基盤とする標準規格で、NMEA 2000®に基づく衛星ナビゲー ションや専用コンポーネントがさらに追加されています。特に重 図3: ISOBUSにおける動的なアドレス割り当て 要なコンポーネントには以下のものがあります。 >> バーチャルターミナル:モニターと手動制御のインプリメント はCANInterface (CanIf)、J1939Nm、J1939Tp、J1939Rmの各モ >> タスクコントローラー:位置データに基づく自動制御のインプリメント ジュールが適宜拡張されています。ただし、 このようなAUTOSAR の拡張に関するサプライヤー間の連携は部分的なものに過ぎませ ん。この領域におけるベーシックソフトウェアレベルの標準化が望 >> トラクターコントローラー: 車両ネットワークとインプリメントネッ トワークの間のデータ交換 まれます。 また、今日ではISO 11783のコンポーネントであるプロトコルの >> シーケンスコントローラー:同一シーケンスの記録および反復 実装も存在するようになりました。AUTOSARでのこれらのプロト コルの標準化は、 「アプリケーションインターフェイス」 ドキュメント >> ファイルサーバー:必要に応じた他ECUのデータの保存 でおそらく実現できます。これはアプリケーションへのインター フェイスのみを定義したドキュメントで、その実装はコンプレックス ドライバー (CDD) を用いて行われることになるでしょう。 最近、Caterpillar、CNHi、John Deereといった大型車両メー J1939と比べると、ISO 11783には大容量データ用のExtended TPと、ナビゲーションデータ用のFastPacketの2つのトランスポー トプロトコルが追加されています。また、アクティブなエラーと最後 カー数社がAUTOSARのメンバーとなったことで、動的なアドレ のアクティブなエラー(DM1-DM3)に対する診断が制限されてい ス指定や足りないプロトコルがいずれかの時点で追加される見込 ます。 みが高まりました。そうなれば、大型の農業車両や建設機械の分 野へのAUTOSARの導入を阻むものはなくなります。 本稿は、2015年11月にドイツで発行された 『Hanser automotive』 に掲載された記事内容を和訳したものです。 画像提供元: 見出し画像および図1~3: Vector Informatik GmbH リンク: 執筆者: Martin Schlodder (Dipl. Inf.) University of Tübingenでコンピューター サイエンスを学び、2004年にVector InformatikGmbHに入社。J1939ソフト ウ ェ ア の 開 発 を 担 当 し 、J 1 9 3 9 を AUTOSARに統合するためのワーキング グループにメンバーとして参加。 ベクターのAUTOSAR ソリューション: www.vector-japan.co.jp/microsar ベクター・ジャパン: www.vector-japan.co.jp ■ 本件に関するお問い合わせ先 ベクター・ジャパン株式会社 営業部 (東京)TEL:03-5769-6980 FAX:03-5769-6975 (名古屋)TEL:052-238-5020 FAX:052-238-5077 E-Mail:sales@jp.vector.com 03
© Copyright 2025 Paperzz