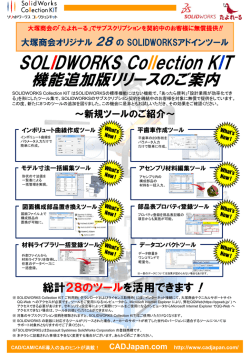
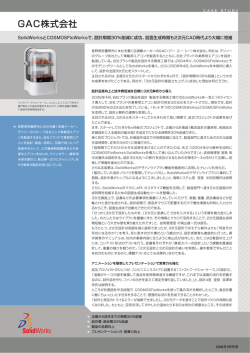
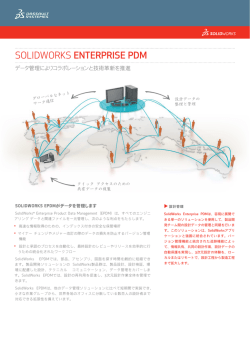
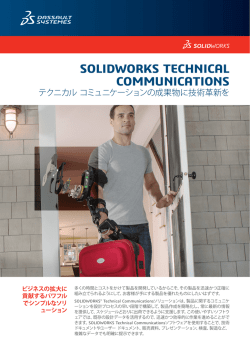
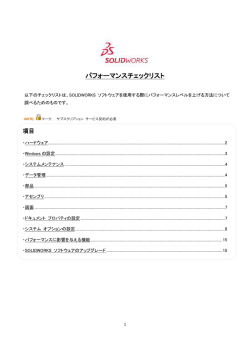
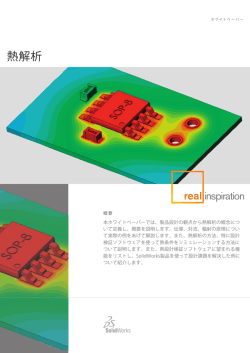
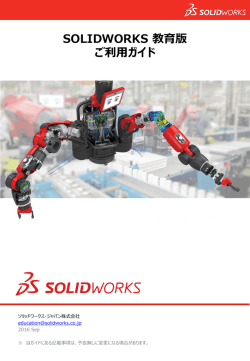
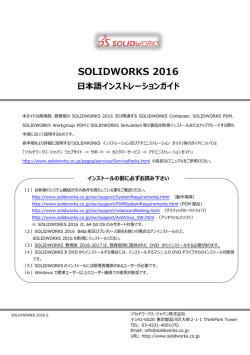
技 術 文 書 イベントベース シミュレーションによ るモーション設計 SolidWorks® ソフトウェアはスマートなモーション設計を支援します。柔軟な イベントベース シミュレーションにより、設計と制御を統合し、試作とテス トのプロセスを効率化します。 漫画家でありエンジニアでもあるルーブ・ゴールドバーグのからくり装置を見たことのある方は多いで しょう。この複雑な装置はプーリー、レバー、風船、ビー玉、その他様々なメカニズムを使って単純な 作業を行います。ゴールドバーグは16ステップからなる歯磨き粉ディスペンサーや、13ステップからな る、頭に装着する自動ナフキンなどを描きました。ゴールドバーグの作品にヒントを得たのミルトン・ ブラッドリーの Mouse Trap® ゲーム (図1)も同様の例で、一連の派手なイベントによりプレイヤーであ るネズミをねずみ取りで捕まえる ゲームです。 図1. MOUSE TRAPゲームのモデル これらの設計では、各イベントはそれぞれ前のイベントと完全に連動しています。1つのイベント時間が 予想より長くても短くても、残りのイベントはドミノ倒しのようにそれに従います。これをイベントベ ースと言います。 また、タイムベースというものもあります。一連のビデオクリップを撮り、それを映画につなぎ合わせ る場合を考えてください。図2のように、最初のシーンは4秒、次のシーンは20秒、というように構成し ます。 図2. タイムベースのビデオのモックアップ シーンに順番をつけた後、やはり最初のシーンは3秒だけで良い、と考えてクリップします。すると... 図3. タイムベースのビデオのモックアップに1秒間「何もない」状態が発生 1 図3に見られるように、セグメント間に何もない1秒が発生します。そのため、続きのセグメントが正しいタ イミングで始まるよう、一つずつ調整しなければなりません。これは面倒です。このようにタイミングをあ まりにも多く変更しなくてはならないのであれば、最初からやりなおす事も考えたくなるでしょう。 さて、Mouse Trapゲームをしたりビデオを作成したりする代わりに今度は、この2つのアプローチが機械シス テムのシミュレーションに与える基本的な影響について考えてみましょう。本書では、図4に示す単純なアク チュエータ システムを使って、タイムベースとイベントベースの両方のアプローチを見ていきます。 図4. 4つのアクチュエータと1つの青いブロック(左)が一連のアクションを行うシステム 青いブロックは最初左下隅にあり、矢印の順序で迷路を移動します。4つのアクチュエータはそれぞれブロック を押した後、収縮します。最終的にブロックは迷路の外に出され、各アクチュエータは元の位置に戻ります。 このメカニズムが正しく動作するか調べるため、モーション シミュレーションを使って設計とアクチュエー タの動きを仮想テストします。モーション シミュレーションではタイムベースまたはイベントベースのアプ ローチを使用できます。 タイムベースとイベントベース シミュレーション(EBS)の違いを完全に理解するには、それらの役割 を「meta」レベルと「minute」レベルという2つのレベルで考える必要があります。前者は機械産業の方法論 のコンテキストでこのプロセスを全体的にとらえる一方、後者はプロセスがどのように違い、変更により各 ステップにどのようなメリットが出るかに注目します。 2 代表的なプロセス 機械設計者は通常、図5に示すmetaプロセスに従います。 図5. 設計者が使用する標準的なMETA設計プロセス 設計者は多くの場合、まずマシンの大まかなコードまたはレイアウトを記述することからはじめます。これら のコードは、制御コードと混同してはなりません。これらは独立したメカニズムの独立した各動作を支配する もので、制御コードはメカニズムを統合するものです。これらのコードを記述した後、マシンの機械的設計を 行います。最終形状に近づいた時点で、設計を仮想的にテストし、各部分をつなぎ合わせる制御 アルゴリズム を記述することができます。設計の制御部分は一般に機械の製造と組み立て後に検証されます。 図4のアクチュエータ設計の例を設計者の観点で考えてみてください。設計者としての最初のステップは各ピス トンを前に伸長し、そして収縮させるコードを記述することです。これにより個別にピストンのモーションを 実現します。次のステップはアセンブリに含まれる構造を設計することで、通常何らかのCADを使用します。 その後ブロック、迷路、ピストンを製造し、制御アルゴリズムを記述して各ピストンの動きの順序を設定しま す。しかし、制御コードがタイミング要件とアクチュエータの機械的能力に対応できない場合どうなるでしょ うか?たとえば、アクチュエータの加速が間に合わなかったらどうなるでしょうか。機械または制御を再度設 計し直さなくてはなりません。 ここで、従来の手法とEBS手法の「minute」レベルの比較の段階に入ります。一般に、製造プロセスは絶対時間 で動作し、多くの制御インフラも絶対時間を要求します。しかし、設計の早期段階およびシミュレーショント ライアルの段階では、絶対時間アプローチには大きな問題がともないます。何が起こればよいかわかっている のに、各アクションが正確にいつ発生するかについては不確かです。最初のピストンを、最初は「1秒」で止め る設計であったのを、「1.5秒」で止め たい場合を考えてみてください。アクチュエータの最大加速度など、重 要な機構設計上の詳細が決定していない設計初期にはよくある調整です。ソフトウェアでは、2番目のアクチュ エータは元の設計通り「1.1秒」で開始するように設定されています。これをマニュアルで「1.6 秒」に変更し 元の時間間隔を一定に保つようにしないと問題が発生します。もちろん、これはすべてのステップをマニュア ルで変更することを意味します。数十万ステップを段階状に完全に変更するのにかかる時間を想像してみてく ださい。最悪の場合、制御コードの変更でつじつまがあわなくなり、完全に再設計することになればもっと多 くの時間、コスト、リソースが必要になります。 3 新しいプロセス この種の変更が図5のプロセスのより早い段階で行えれば、最初からやり直すという悲惨なシナリオを回避 できることは明らかです。EBSはこのニーズにmetaレベルとminuteレベルの両方で対応します。EBSによっ てプロセス全体がどのように変化するかを示したのが図6です。 図6. イベントベース シミュレーションにより可能となる新しい機械設計プロセス 初期のコーディング手順は同じですが、その後のプロセスは完全に異なります。設計を変更して対応する動 作の変更をする、またはその逆を同時に行えるのです。このサイクルにより、変更と繰り返し工程は直線的 なプロセスよりも格段に迅速に行えます。そして、設計と制御の手順が完成した後、製造が最後の大きな段 階となります。制御に対する追加的変更や変換は後から行うこともできますが、設計者が新たに設計を始め る可能性は従来の連続的なプロセスの場合よりも格段に高くなります。 minuteレベルにおいては、EBSにより特定の時間ではなくイベントによりアクションが引き起こされる(トリ ガ)されるシミュレーションを作成できます。ただし、この方法だけではなく、時間に基づいてシミュレー ションを行うことももちろん可能です。以下の図7に、図4のアクチュエータ4個の動作を定義するインタフ ェースの例を示します。 図7. 4つのアクチュエータを制御するSOLIDWORKSのイベントベース シミュレーション インターフェイスの例 4 シミュレーションはゼロ以上の時間のトリガで開始します。次の4つのタスク(またはアクション)は前のタ スクが終了した後に引き起こされ(トリガ)されます。たとえば、「Task 1」は最初のアクチュエータの伸長が止 まった時に2番目のアクチュエータが伸長進することを示しています。続くアクチュエータの伸長、収縮も同 じパターンに従っています。青いボックスを迷路の外に出す最後のトリガは下の図8に示す近接センサーです。 図8. 最後のアクチュエータが紫の壁の49.00 mm 以内に入ると近接センサー(赤)がトリガされる 赤で示された近接センサーは、ブロック上で紫の壁から反対側になる部分に配置されています。センサーは紫 の壁から49.00 mm 以内に入ると「アラート」を生成します。図7のTask 6で示すように、このアラートが今度 は最後のアクチュエータをトリガし、ブロックを押し出します。これは、ブロックが迷路を通って紫色のサー フェスに近接して初めて発生することに注意してください。 SolidWorksのEBSインターフェイスには図9のようなGanttチャートも含まれており、各イベントのタイミング と継続時間を視覚的に確認できます。 図9. SOLIDWORKS EBS ツールに含まれるGANTTチャート 5 図の中でオレンジ色の領域はイベントの継続時間を表しています。オレンジの棒グラフが長いほど、シミュ レーション内の時間が長いということになります。細い青線はイベントが別のイベントの完了に直接リンク されている(両者はイベントベースである)ということを意味します。左側の表と右側のGanttチャートは 直接リンクされており、システムの動作を即座に可視化することができます。 イベントベース シミュレーションのメリット 何よりも、EBSはデザイナー、エンジニア、制御設計エキスパートの間のコミュニケーションを著しく高め ることによって製品の設計意図を明確にすることができます。EBSを使わなければ、2つのグループが全く 異なる言語で話す結果となります。エンジニアやデザイナーは彼らの目標を説明しますが、制御コードが何 を必要とし、何をもたらすのかについてわかっていません。彼らは「これを5秒で回転させたい」と言いま すが、どうやってそれを実現できるかについてはわかりません。一方制御エンジニアは、提案されている一 連のイベントが、首尾一貫した細かいコードの形で示されないと明確に理解できません。エンジニア達に対 して、「どこで回転させたいのか、その動きはシステムの他の部分にどのように関連しているのか?」とい うことを尋ねるでしょう。EBSツールを使うことによって、制御設計にあまりなじみのない設計者も、明確 に機械設計のゴールを説明でき、同時に制御エンジニアもこれらの視覚的情報をもとに詳細コードに簡単反 映させることが可能になります。 metaレベルにおいては、EBSは企業が大幅な時間とコストの節約を実現する助けとなります。EBSの持つ統 合的な性質により、設計と、提案されている機能について即座にフィードバックを得ることが可能です。初 期の制御アルゴリズムをデバッグする前に製品の試作を行う必要がなくなります。事前にCADで機械を テス トすることができるため、完全な設計のやり直しが発生する可能性も低くなります。さらに、わかりやすい EBSインターフェイスにより、社内でより多くの人々が製品設計に大きく貢献できることになります。エン ジニアは制御システムの専門知識をもたなくても、制御要件の概要を定義できるようになります。 よりminuteなレベルでは、他の特筆すべきメリットもあります。まず、イベントベースのアプローチはより 現実的であり、実際の製品に適用しやすい特徴があります。センサーは実際に存在します。これらは多くの 機械設計において重要な部品です。また、SolidWorks EBSの提供するイベントベースとタイムベースのシミ ュレーションの組み合わせは、完全にタイムベースのアプローチよりも格段に現実のアプリケーションに近 いものとなります。 たとえば、洗車機を考えてみましょう。車が装置に入った後、プロセス内の次のステップは時間に基づ いた ものではありません。運転者が前進し、センサーは車が洗車位置にあることを検出します。その後、決めら れた時間で洗車が行われます。これはイベントベースの制御に、タイムベースの制御が続いたものです。他 にも数え切れないプロセスが2つの種類の組み合わせを使用しています。 またminuteレベルにおいて、EBSは従来の手法よりも変更が格段に簡単です。Step 1 の時間を長くしても、 Step95まで段階的に変更を行う必要はありません。イベントとその間のリンクは変わらないままです。この ことは、シミュレーションを設計プロセスのどのフェーズで行うかを考慮すると重要になります。制御とタ イミングの編集は、CAD を使った機械設計と同じぐらい頻繁に行われます。さらに、設計者やエンジニアは 個別の部品の限界についてたいていよく知っています。たとえば、アクチュエータのタイプAは0.5秒で1メ ートル伸長できるとします。アクチュエータ タイプBに変更すると伸長に1.5秒かかります。開発のこの段階 では面倒なコード変更は必要ありません。EBSで十分です。 最後に、EBSは幅広いシナリオに適用可能だという点があげられます。機械の動作はわかりやすいもので す。設計者がEBSで解決しようとする制御上の問題はコード記述者が考慮すべきものと同じだからです。し かし、EBSの提供するシミュレーションにはもっと大きな効果があります。ウォータースライダーの設計を 考えてみてください。設計者はスライダーの各部分ですべる人に対する摩擦力を変えなければならないこと を知っています。スライダーの一番上では、素早く滑り出せるように摩擦が低い方が良いですが、出口では 痛い思いをしないようにスピードを落とす必要があるため、最後の方に向けて摩擦を上げていきます。EBS でこれらの力をモデル化することにより、大がかりなコーディングを全く行うことなく、タイミングが正し いかどうかを調べることができます。EBSの用途が機械設計に限られないことは明らかです。 6 まとめ EBS は制御系とCADモデリングの協調に革命をもたらします。このアプローチでは、モデルと希望の動作 を直接統合することが可能になり、機械的、電気的設計を追求しながら機械制御の柔軟性を保つことがで きます。EBS はこれを全く新しい方法で実現します。特定の時間やイベントを定義する代わりに、各ステ ップを互いの関係でスタート、ストップさせることができます。これは大きな時間とコストの削減につな がります。製造を行う前にシミュレーションで製品を作成、変更できるため、コストのかかる設計プロセ スの手戻りを回避することができます。 また、イベントベースのアプローチはシミュレーション時間の短縮にもなります。時間の変更を段階的に 修正していく手間がないからです。Step 1 に対する変更は、それに続くすべてのイベントに対して遷移し ます。なによりも、EBSを使うことで制御設計のエキスパートと様々な状況で効率的にコミュニケーショ ンできます。意思疎通の障害がなくなり、すべての人がより効率的に協調してよりよい製品づくりに取り 組むことが可能になります。 その他様々なアイデアおよび情報は SolidWorks のWebサイト、www.solidworks.co.jp をご覧ください。 SolidWorksのeNewsletter、プレスリリース、セミナーや展示会、ユーザーグループについての情報は、 www.solidworks.com/pages/news/newsandevents.html をご覧ください。 日本本社 Phone: +81-3-5442-4001 Email: info@solidworks.co.jp 大阪オフィス Phone: +81-6-6455-7431 Email: info@solidworks.co.jp 本社 Dassault Systèmes SolidWorks Corp. 300 Baker Avenue Concord, MA 01742 USA Phone: +1-978-371-5011 Email: info@solidworks.com www.solidworks.co.jp SolidWorksはDassault Systèmes SolidWorks Corp. またはその米国その他の国の子会社の登録商標です。その他全ての会社名および製品 名は各所有者の商標または登録商標です。©2010 Dassault Systèmes SolidWorks Corp. All rights reserved. MKSIMTECHEVENTJPN0210 7
© Copyright 2025 Paperzz