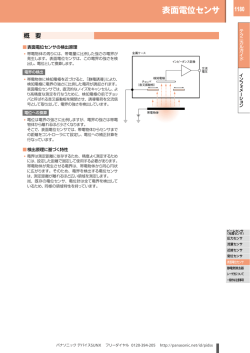
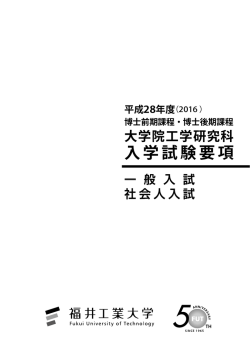
電子制御工学科 ふりがな ふじとみ のぶゆき 氏 名 藤 冨 信 之 専門分野 商船学科/練習船広島丸 制御工学 計測工学 職名・学位 TEL E-mail 教授・商船学修士 写真 0846-67-3069 fujitomi@hiroshima-mt.ac.jp 主な研究テーマ 電子制御工学科 ・ イノシシ捕獲檻監視システムの開発 ・ 搭載型船体動揺抑制装置の開発 ・ 吸引型磁気浮上方式の応用 ・ 航走波の特性解析 技術相談分野 キーワード 利用可能な設備・資料等 流通情報工学科 光電センサ ・ サーボ機構 モーションコントロール ・ センサ イノシシ ・ メカトロニクス イノシシ捕獲檻監視システムの開発 一般教科 概要 イノシシ捕獲檻監視システムは、イノシシを検知するセンサ、センサの出力の 監視及び扉の閉鎖の制御を行うマイクロコンピュータ、モータの制御を行うため のモータドライバ、モータ、扉ストッパ、防水カバーから構成される。イノシシの 檻内部への進入を検知には、 従来の見えるトリガワイヤを見えない電子的な センサに変更した。このことにより、従来の方式に比べ、イノシシの捕獲率の向 上に寄与している。 システム構成図 28
© Copyright 2025 Paperzz